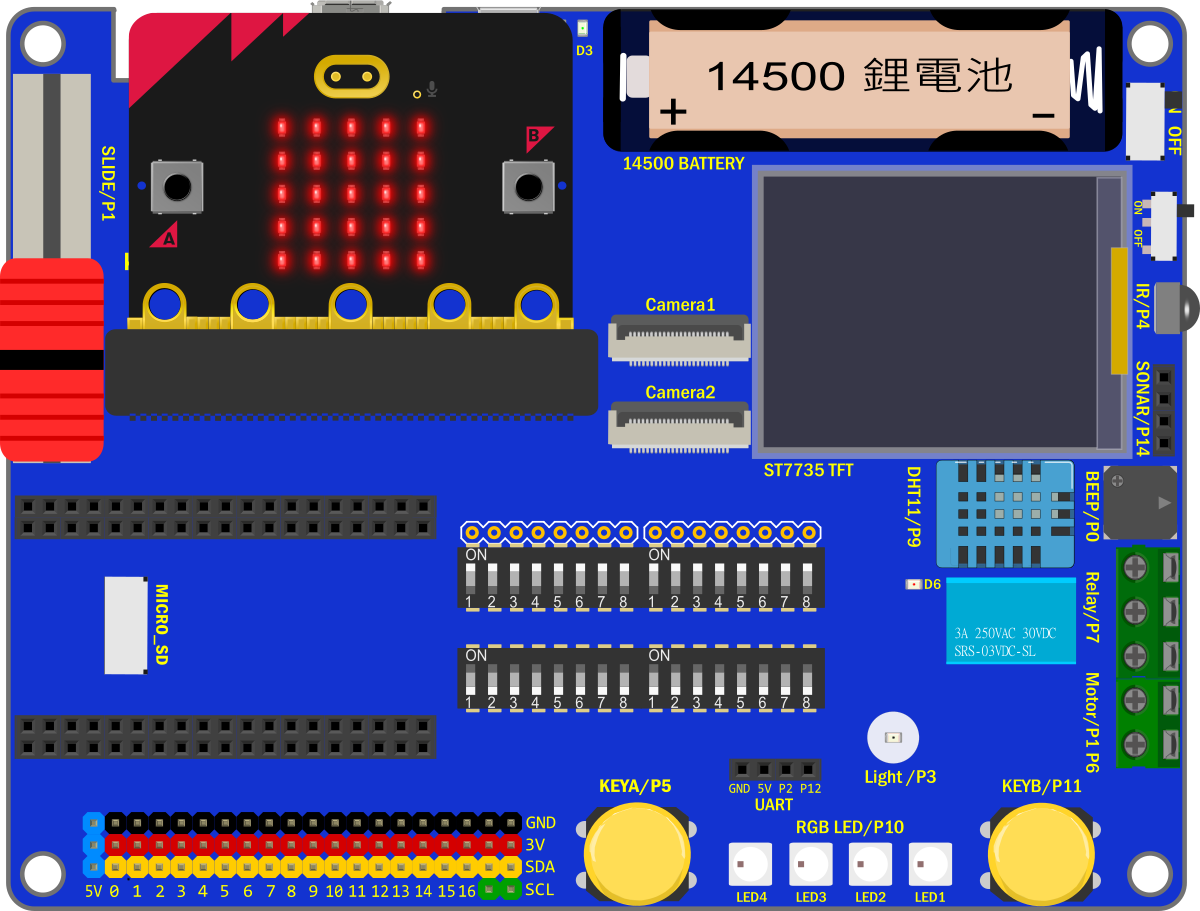
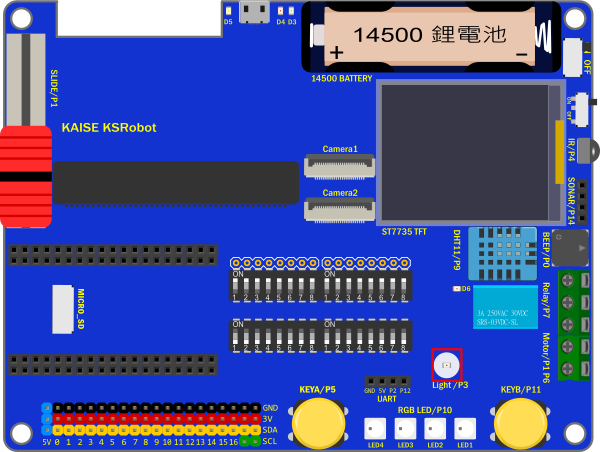
KSB065 家控板
micro:bit 使用說明
基本範例
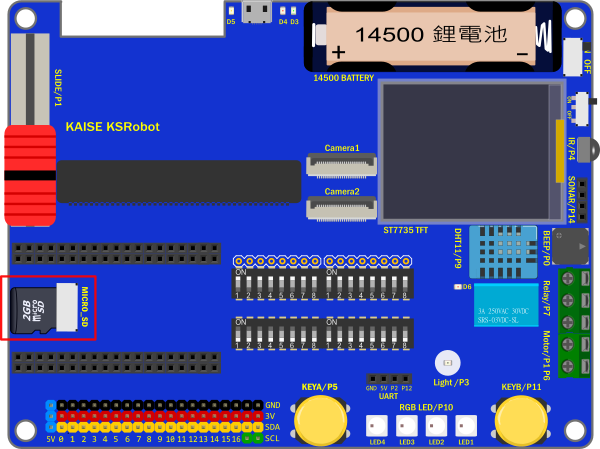
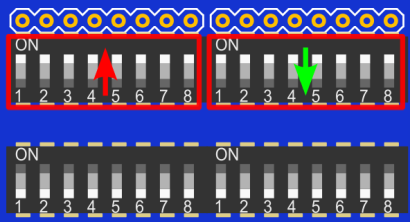
KSB065 配備很多感測器,所以有些感測器的使用IO腳位會跟其它感測器重複,因此要使用指撥開關來選定要使用的感測器且要關掉腳位重覆的感測器。
再練習基礎範例時,請先把 攝像鏡頭和SD 卡拿掉,指撥1 和 指撥2 的開關全部都撥到ON
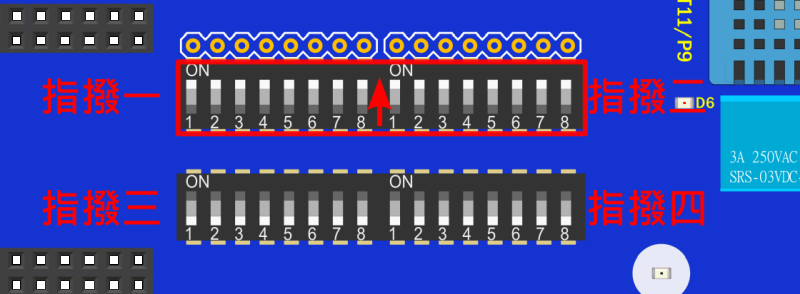
指撥開關腳位 對應表格
基本範例
範例下載:選範例後再另存連結
基本擴展積木:https://github.com/kaise-ksrobot/pxt-KSB065
範例1 蜂鳴器範例
打開瀏覽器連結 https://makecode.microbit.org/
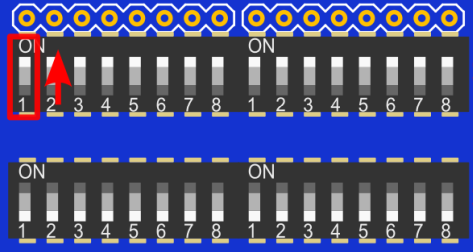
1.蜂鳴器使用P0
使用時,指撥1的開關1要打開
2.「 匯入 」-> 「Import File」 匯入 microbit-EX1_BEEP.hex

3.Download完成,按 主板 A鍵 音樂響起
範例 彩色螢幕範例
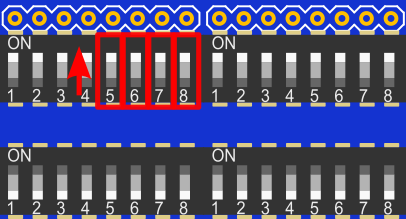
1.彩色螢幕使用IO5,IO18,IO23,IO27
使用時,
指撥1的開關5要打開,指撥1的開關6要打開
指撥1的開關7要打開,指撥1的開關8要打開
2.「 匯入 」-> 「Import File」 匯入 microbit-EX2_TFT.hex

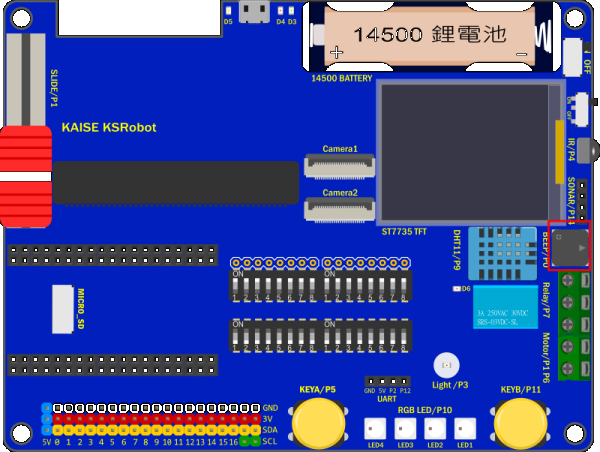
3.Download完成,要記得打開TFT LCD的背光電源,執行時TFT LCD會有顯示 "Hello KAISE" 文字。
PS:字型1大小是5x5 pixel,字型2 是10x10 ,字型3 是15x15,字型4 是20x20 ,字型5 是25x25
範例3 按鈕範例
1.
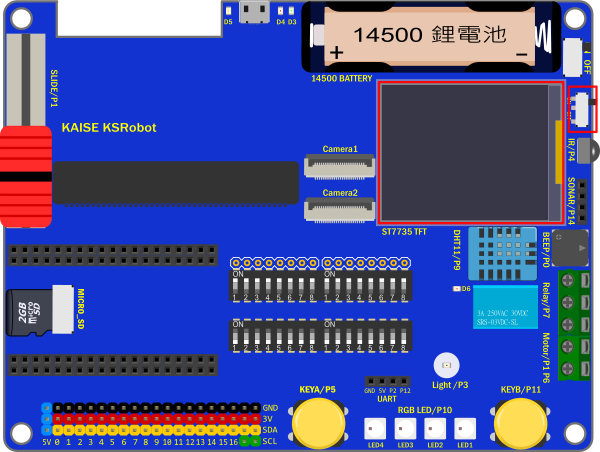
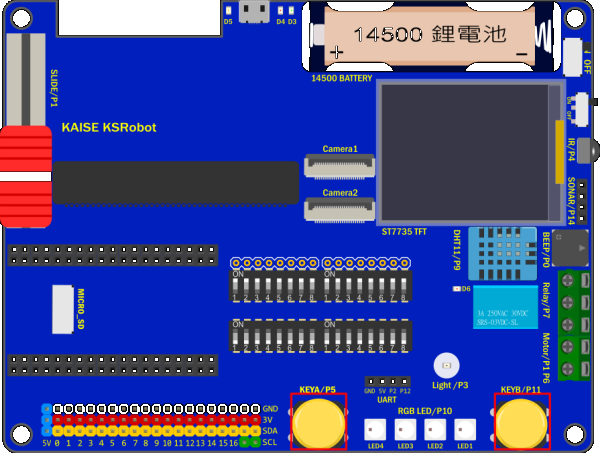
按扭A使用P5
按扭B使用P11
按鈕腳位跟指撥設定沒有關係
2.「 匯入 」-> 「Import File」 匯入 microbit-EX3_Button.hex
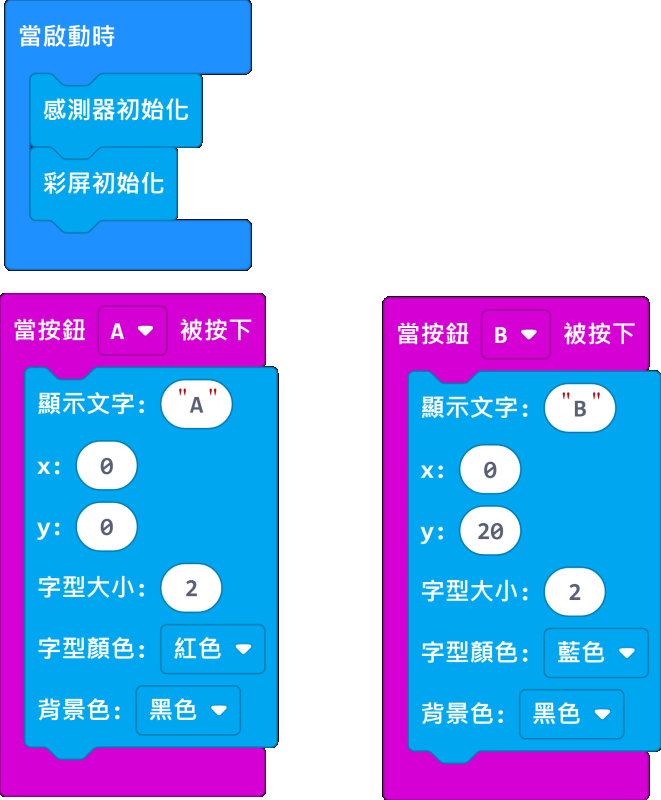
3.Download完成,按 主板 A鍵 在TFT (0 , 0)顯示紅色A字,按 主板 B鍵 在(0 , 20)顯示藍色B字
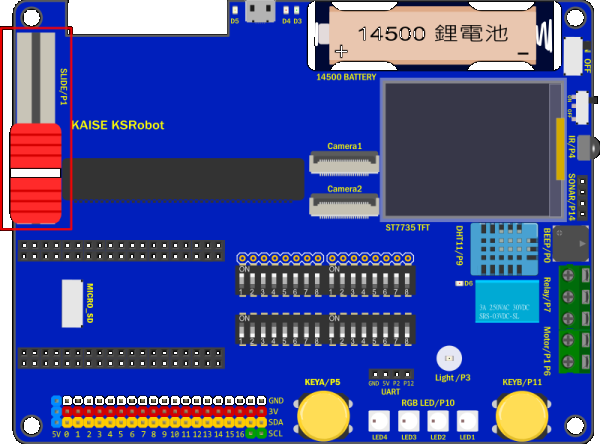
範例4 滑桿範例
1.滑桿使用P1
使用時,指撥1的開關2要打開
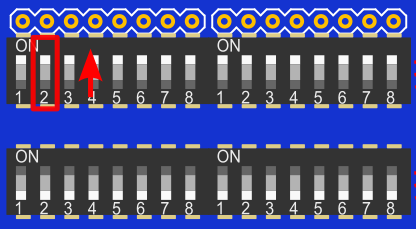
PS
Slide(滑桿) 和 Motor(馬達控制) 的 IO腳位P1重複,功能2擇1
2.「 匯入 」-> 「Import File」 匯入 microbit-EX4_Slider.hex

3.Download完成,在TFT (0 , 0)每秒重覆顯示遙桿的數值
PS:在程式中為了消除數值長度不一,造成影像重疊,所以用了4個空白字元來清除畫面。 如果不是要清除大範圍的影像,不建議使用「清除螢幕」的積木。
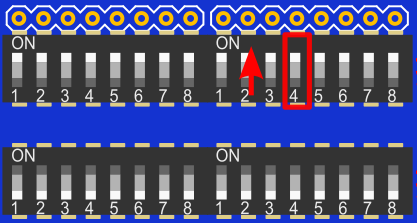
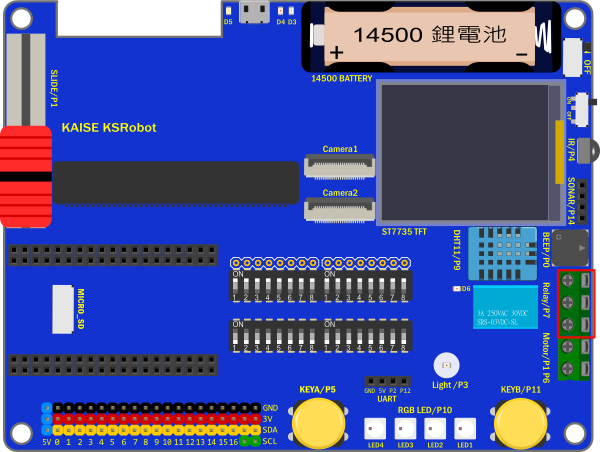
範例5 繼電器範例
1.繼電器使用P7
使用時,指撥2的開關4要打開
2.「 匯入 」-> 「Import File」 匯入 microbit-EX5_Relay.hex

3.Download完成,執行時會聽到繼電器切換開關的搭搭聲
範例6 亮度範例
1.亮度感測器使用P4
使用時,指撥2的開關1要打開,SD卡要拿掉 或者 指撥2的開關8要關掉
PS
Light(光度) 和 SD 的 IO腳位P4重複,功能2擇1
2.「 匯入 」-> 「Import File」 匯入 microbit-EX6_Light.hex

3.Download完成,在TFT (0 , 0)每秒重覆顯示亮度感測器的數值
PS:在程式中為了消除數值長度不一,造成影像重疊,所以用了4個空白字元來清除畫面。 如果不是要清除大範圍的影像,不建議使用「清除螢幕」的積木。
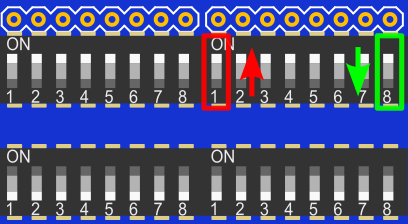
範例7 DHT11溫濕度範例
1.DHT11使用P9
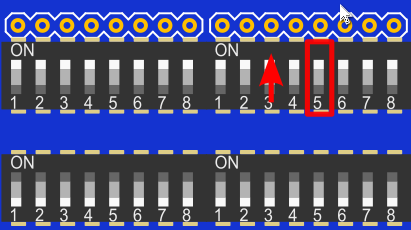
使用時,指撥2的開關5要打開
2.「 匯入 」-> 「Import File」 匯入 microbit-EX7_DHT11.hex
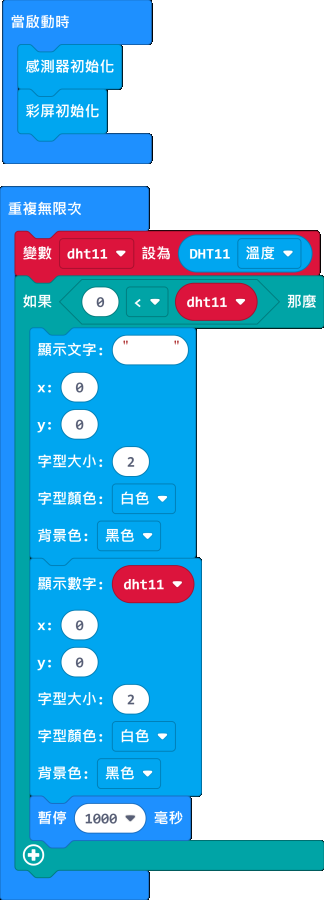
3.Download完成,在TFT (0 , 0)每秒重覆顯示DHT11的溫度數值
PS:DHT11如果取值沒有完整,會得到-999的數值,所以程式中加上邏輯判斷,另外為了消除數值長度不一,造成影像重疊,所以用了5個空白字元來清除畫面。 如果不是要清除大範圍的影像,不建議使用「清除螢幕」的積木
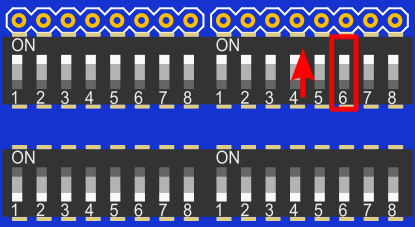
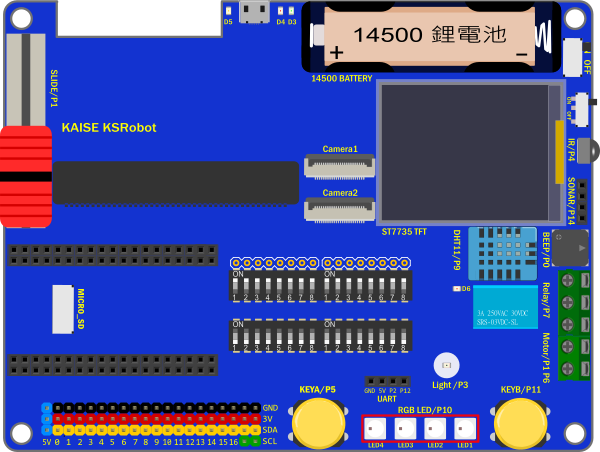
範例8 全彩燈(WS2812B)範例
1.全彩燈(WS2812B)使用P10
使用時,指撥2的開關6要打開
2.「 匯入 」-> 「Import File」 匯入 microbit-EX8_RGB.hex
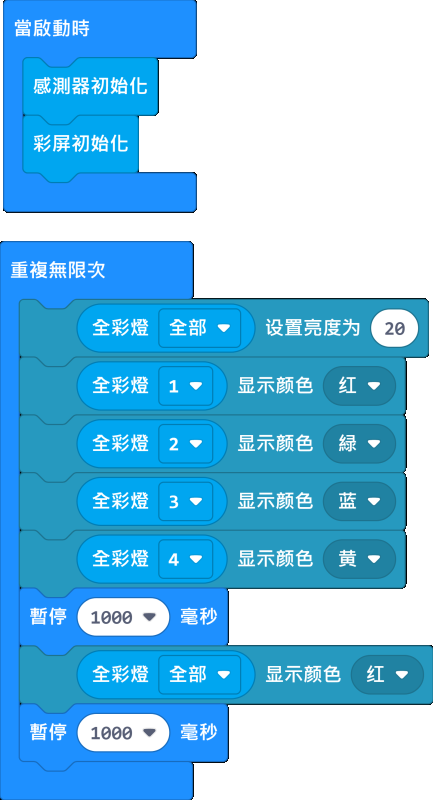
3.Download完成,執行時設定全彩燈的亮度後,4顆全彩燈(WS2812B)會分別亮 紅色 綠色 藍色 黃色,等候1秒,再全亮紅色,重覆迴環。
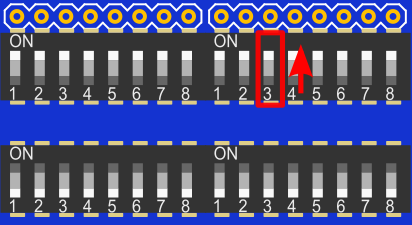
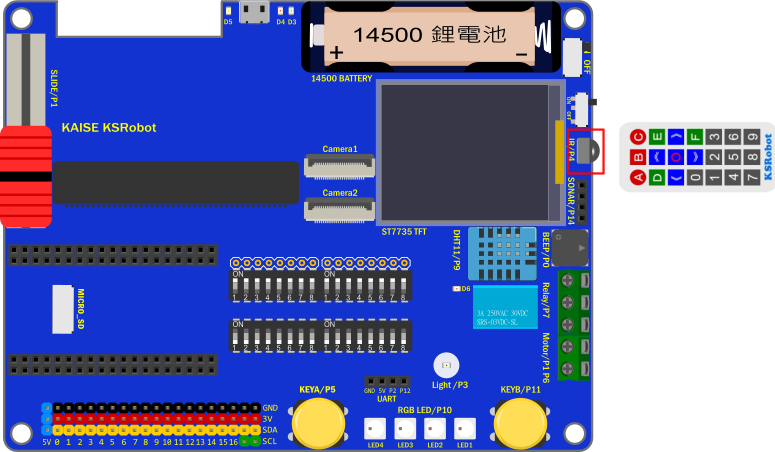
範例9 紅外遙控範例
1.紅外遙控接收元件使用P3
使用時,指撥2的開關3要打開
2.紅外遙控器積木:https://github.com/kaise-ksrobot/pxt-ksrobot-ir
「 匯入 」-> 「Import File」 匯入 microbit-EX9_IR_Remote.hex
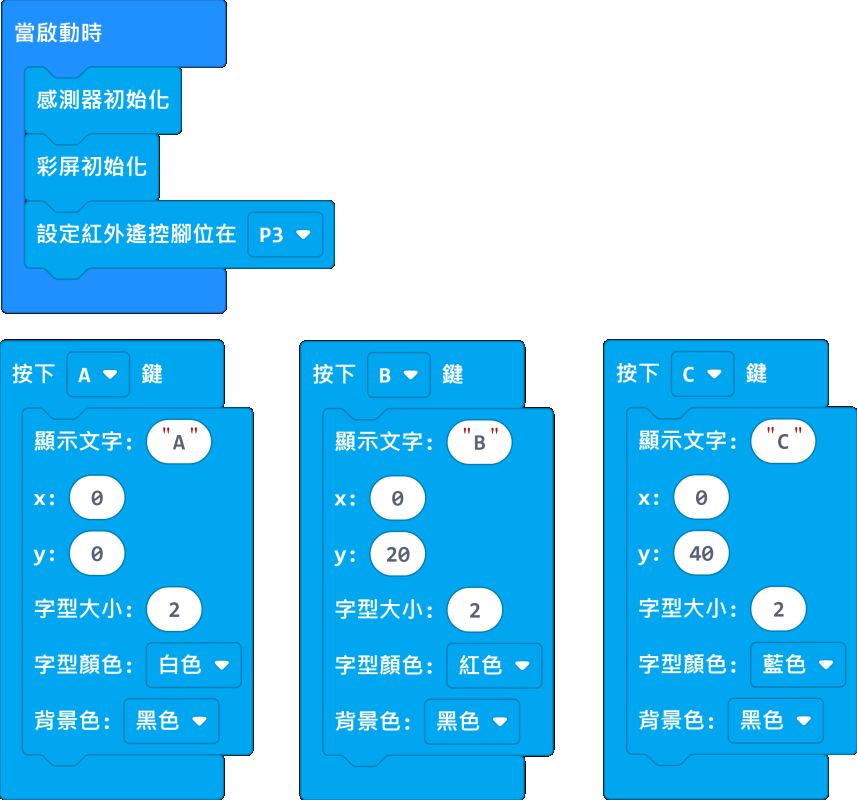
3.Download完成,按KSRobot 21鍵 紅外遙控器 的A鍵 在TFT (0 , 0)顯示白色A字,按紅外遙控器 的B鍵 在TFT (0 , 40)顯示紅色B字,按紅外遙控器 的C鍵 在TFT (0 , 60)顯示藍色C字。
PS:要先設定紅外接收元件的腳位為P3
範例10 直流馬達控制範例
1.馬達控制
L9110S_1A 使用P6
L9110S_1B 使用P1
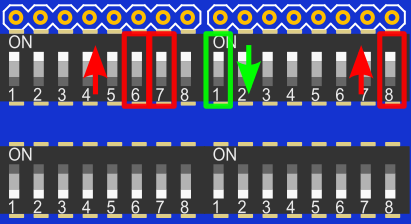
使用時,指撥1的開關2 要關掉,
指撥2的開關2 要打開,指撥2的開關7 要打開
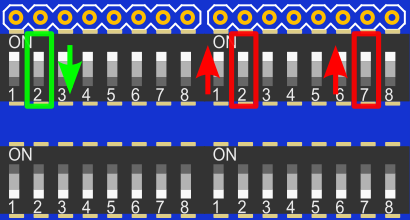
PS
Motor(馬達控制) 和 Slide(滑桿) 的 IO腳位P1重複,功能2擇1,所以使用馬達控制時滑桿要關掉
2.「 匯入 」-> 「Import File」 匯入 microbit-EX10_Motor.hex

3.Download完成,執行時會馬達重覆的快速正轉1秒,停止1 秒,慢速反轉1 秒
PS:馬達電流過大,要測試馬達一定要14500鋰電池
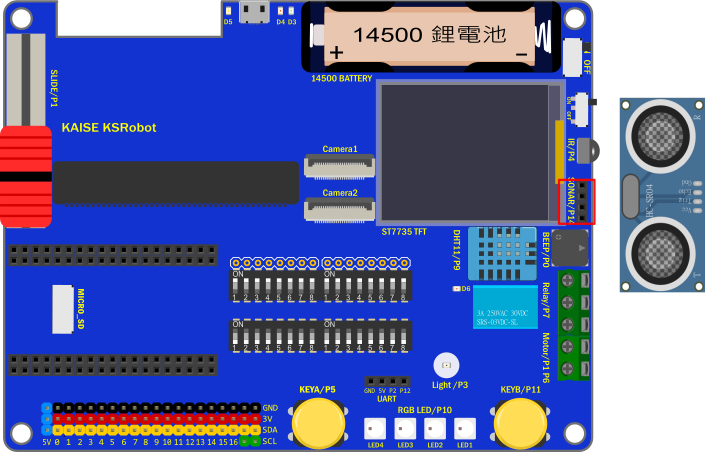
範例11 超音波範例
1.超音波使用P14
使用時SD卡要拿掉,超音波腳位跟指撥設定沒有關係
PS
Sonar(超音波插座) 和 SD 的 IO腳位P14重複,功能2擇1
2.「 匯入 」-> 「Import File」 匯入 microbit-EX11_Sonar.hex
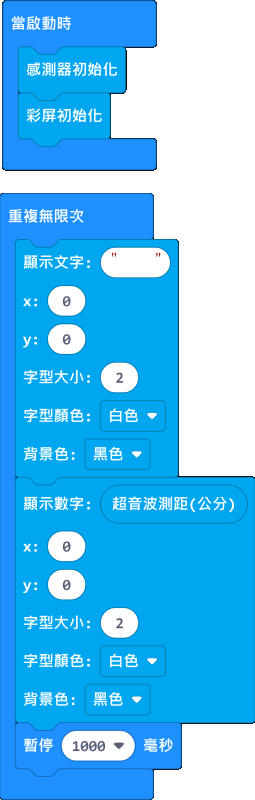
3.Download完成,在TFT (0 , 0)每秒重覆顯示超音波感測器的數值
PS:在程式中為了消除數值長度不一,造成影像重疊,所以用了4個空白字元來清除畫面。 如果不是要清除大範圍的影像,不建議使用「清除螢幕」的積木。另外如果是5V 電位的超音波,請使用擴展板上的USB插座或14500鋰電池供用。
範例12 SD卡範例
1.SD卡使用IO4,IO18,IO19,IO23
使用時,超音波要拿掉,
指撥1的開關6要打開,指撥1的開關7要打開
指撥2的開關1要關掉,指撥2的開關8要打開
PS
SD 和 Light(光度) 和 的 IO腳位P4/IO4重複,功能2擇1
SD 和 Sonar(超音波插座) 的 IO腳位P14/IO19重複,功能2擇1
2.SD卡積木:https://github.com/kaise-ksrobot/pxt-KS-SD
「 匯入 」-> 「Import File」 匯入 microbit-EX12_SD.hex

3.Download完成,按 主板 A鍵 在SD卡的data.txt寫入滑桿數值和",",按 主板 B鍵 在TFT (0 , 0)顯示SD卡的data.txt內容,按 主板 A+B鍵 刪除data.txt檔案,並清除TFT顯示的內容
PS:要記得選”彩屏和SD初始化“。
範例13 micro:bit 5x5 LED範例
KSB065 也可以同時使用TFT LCD和micro:bit 5x5 LED矩陣,但要先把指撥2全部關閉,所以跟指撥2有關係的感測器就不能使用了
使用時,指撥2的開關要全部關閉
2.「 匯入 」-> 「Import File」 匯入 microbit-EX13_Show_LED.hex
