KSR045 MicroBall 球型機器人
1. 簡介
MicroBall 球型機器人是一種外觀呈球形的移動機器人。通常由球形的殼體和內部驅動單元(IDU)組成。球形機器人通常在平面上滾動移動,可以透過內部驅動輪轉動、或重心調整等方法進行移動。
MicroBall 球型機器人的外殼通常由固體透明材料製成,以保護內部結構。MicroBall 球型機器人可以是自動的或遙控的,並且由於其活動特性和封閉的外殼,通常使用無線通訊進行內部和外部控制。它們通常由內部電池供電,但也有一些使用太陽能電池。
MicroBall 球型機器人的應用非常廣泛,包括監視、環境監測、巡視、行星探索、復健、寵物玩伴、兒童發展以及娛樂。還能夠跨越多種地形(如沙地、凹凸不平地面)、甚至在水上行動的兩棲機器人。
在本說明書中,我們將使用micro:bit微控制器與360度伺服馬達,打造出屬於我們自己的全地形MicroBall 球型機器人。
2. 組裝
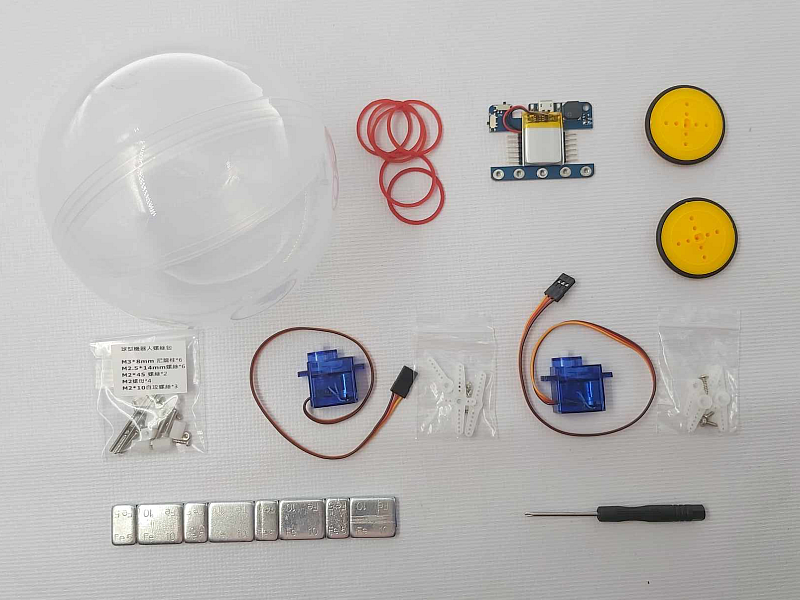
MicroBall 球型機器人零件清單列示如下(不含MICRO:BIT主板):
KSB073 3PWM 鋰電池擴展板 * 1
M3 * 8mm 尼龍柱 * 5+ (備用 * 1)
M2.5 * 14mm螺絲 * 5 +(備用 * 1)
SG90P-360(360度)連續旋轉 塑膠齒輪 伺服馬達 * 2
黄色TT馬達皮帶輪 * 2
平衡配重塊 * 1
12cm透明扭蛋殼 * 1
小橡皮筋 * 6條
M2 * 45 螺絲 * 2
M2螺母 * 2 +(備用 * 2)
M2 * 10自攻螺絲 * 2 + (備用 * 1)
十字小起子 * 1
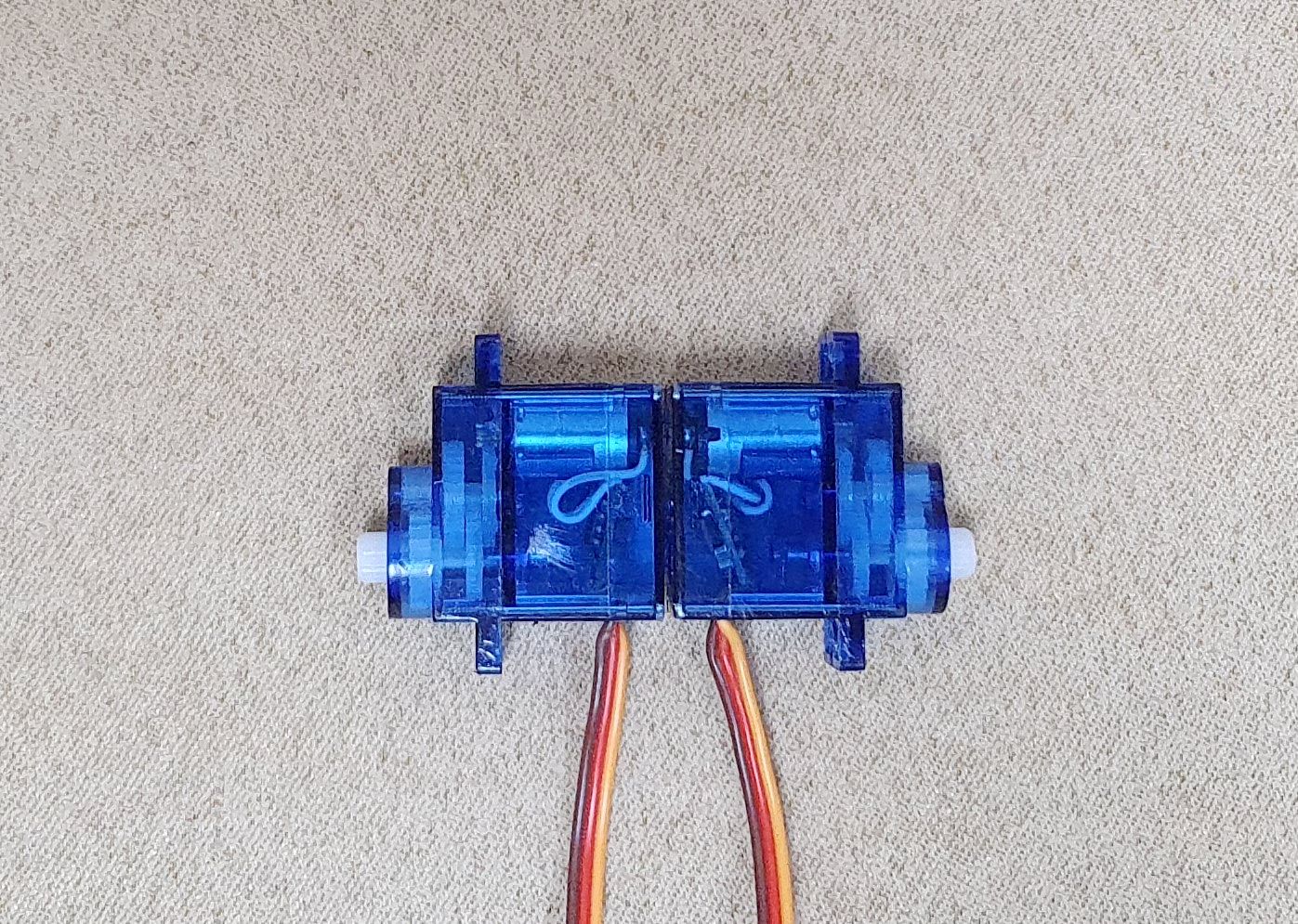
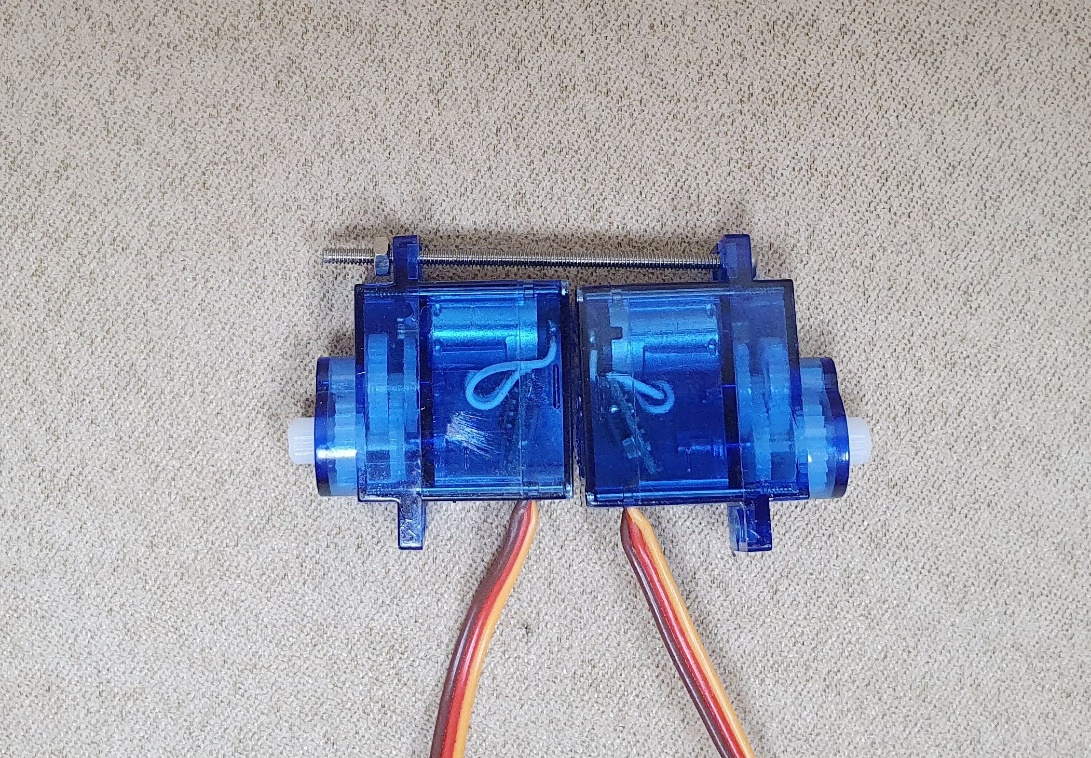
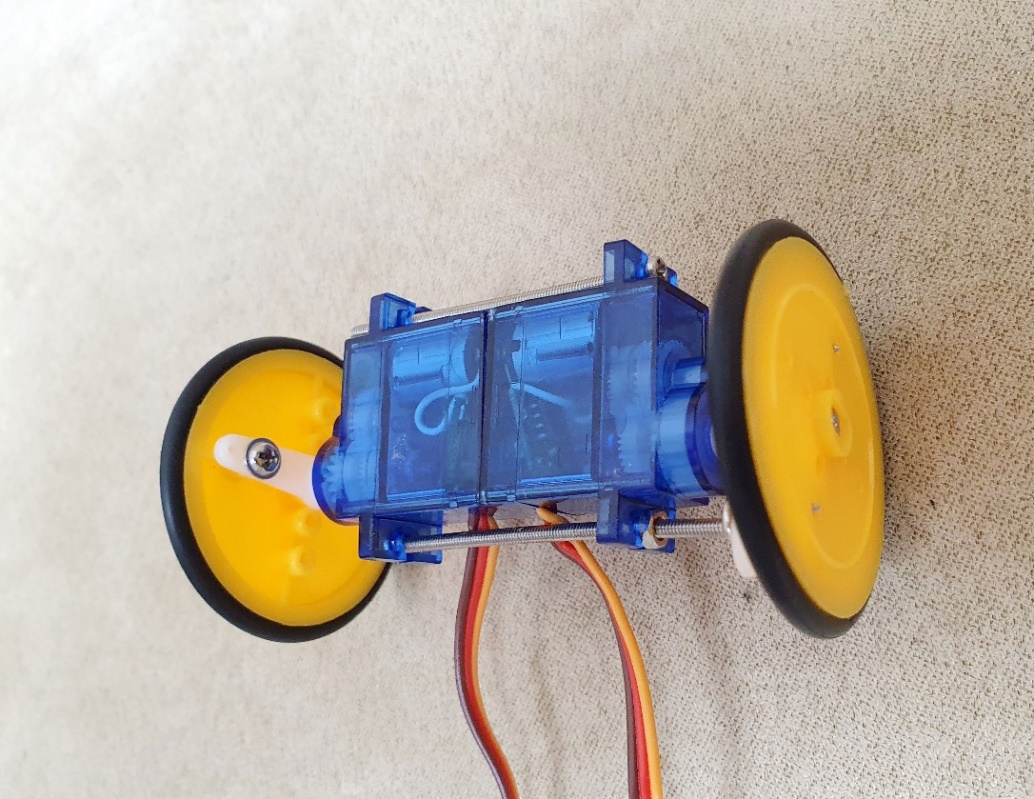
首先,我們將兩個 360度伺服馬達,底部相接排列,請注意線材需放在同一側(也就是伺服馬達的兩條線都在同一邊),如下圖所示:
透過M2 * 45長螺絲與M2六角螺母固定其中一側,此時尚不需要鎖緊鎖緊,如下圖所示:
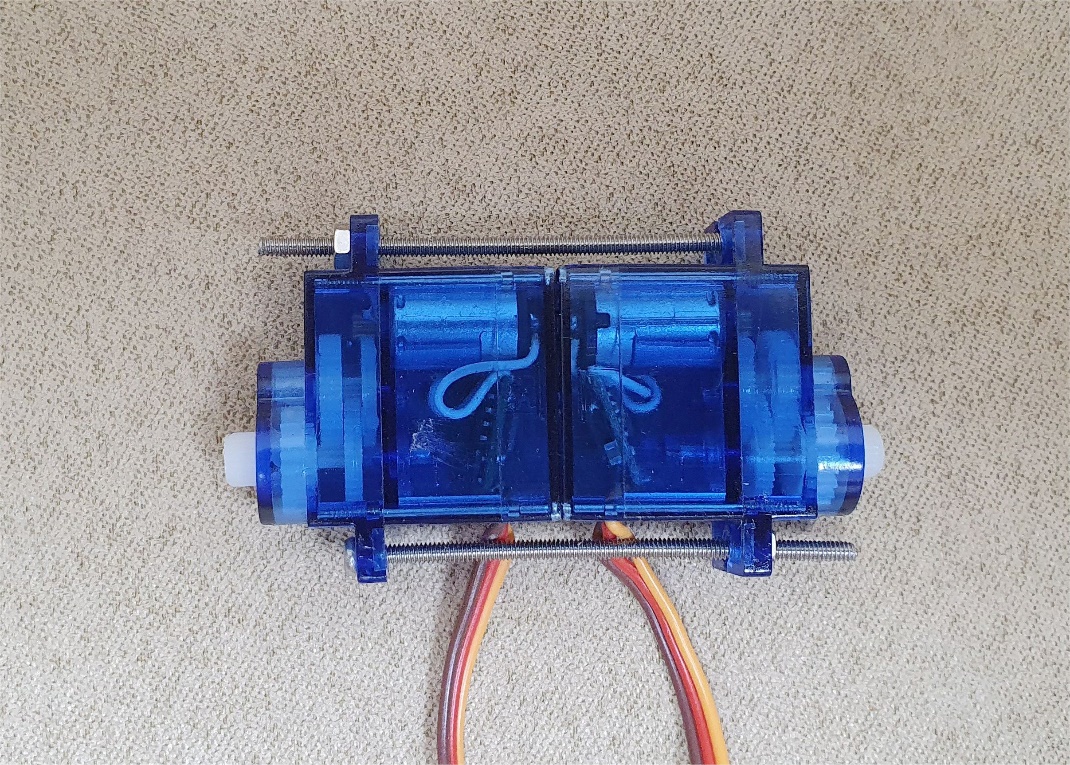
另一側也相同,透過M2 * 45長螺絲與M2六角螺母固定另外一側,透過兩側螺絲慢慢調整與鎖緊,讓伺服馬達底部平貼在一起,並彼此牢牢固定,如下圖所示:
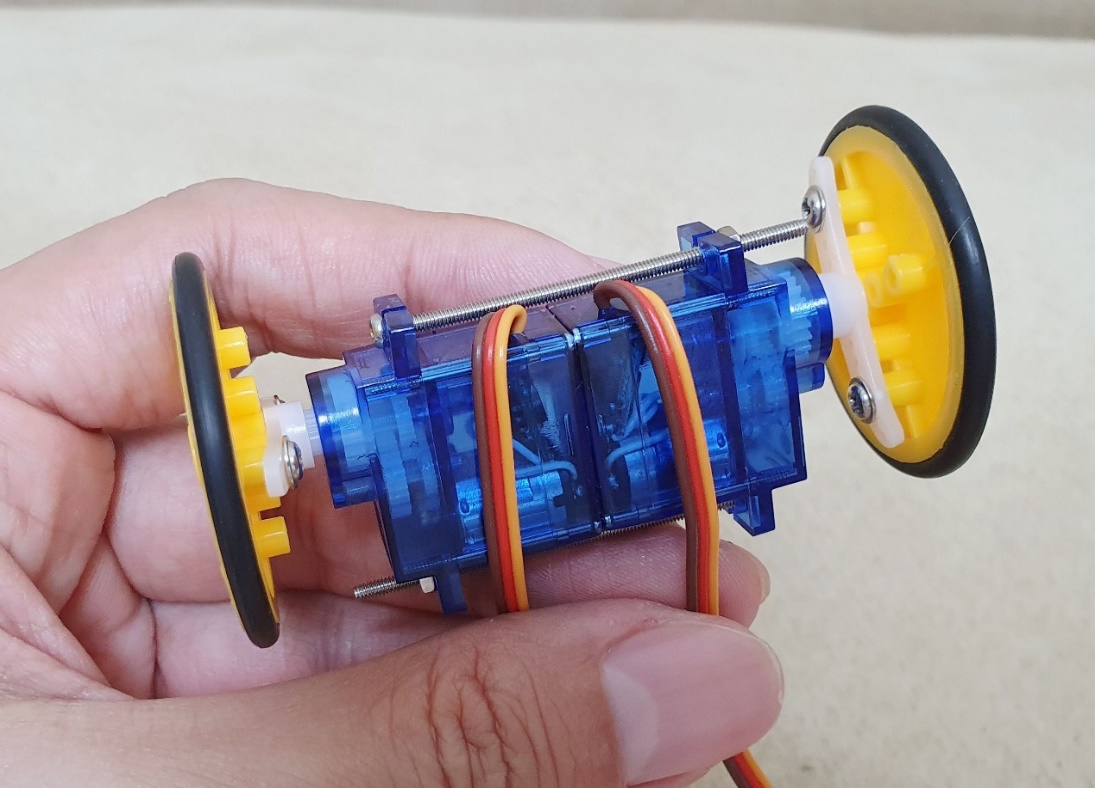
將伺服馬達擺臂以舵機配件包內兩顆螺絲固定在黃色輪子的內側,如下圖所示:

圖2.4 以兩顆螺絲與伺服馬達擺臂固定輪子
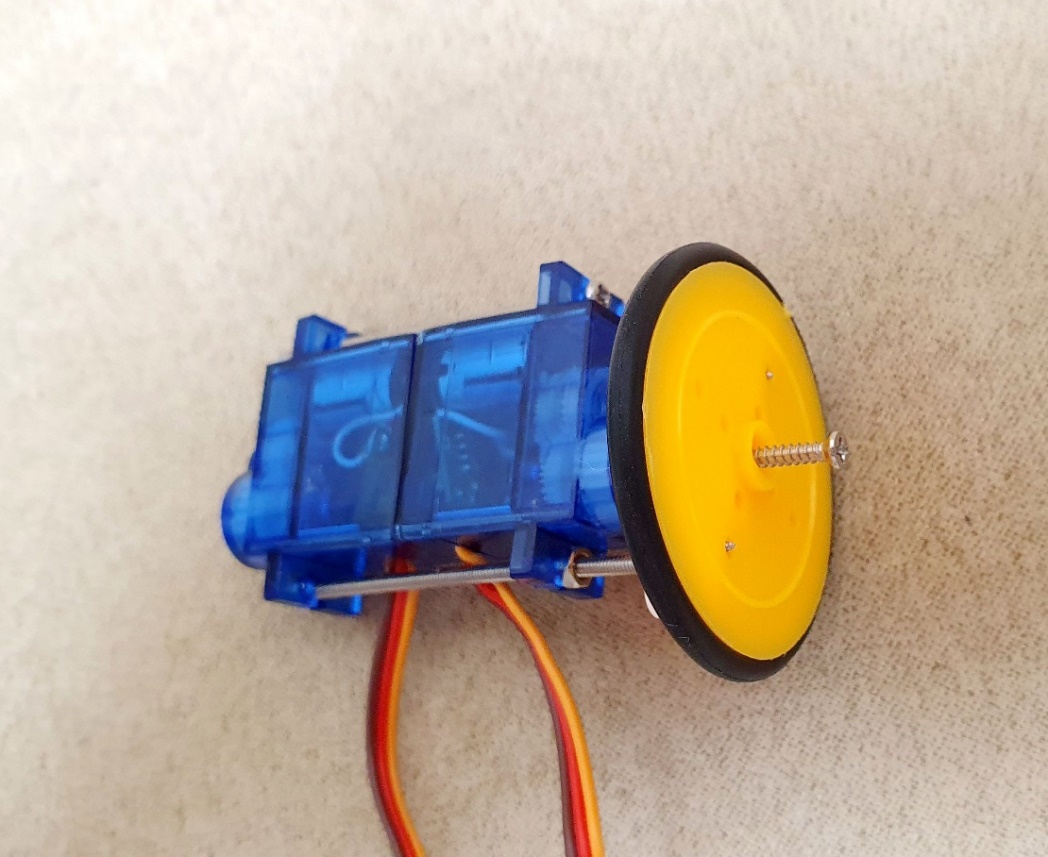
透過M2 * 10自攻平尾長螺絲將輪子固定在伺服馬達上,如下圖所示:
將兩個輪子都固定在伺服馬達上,如下圖所示:
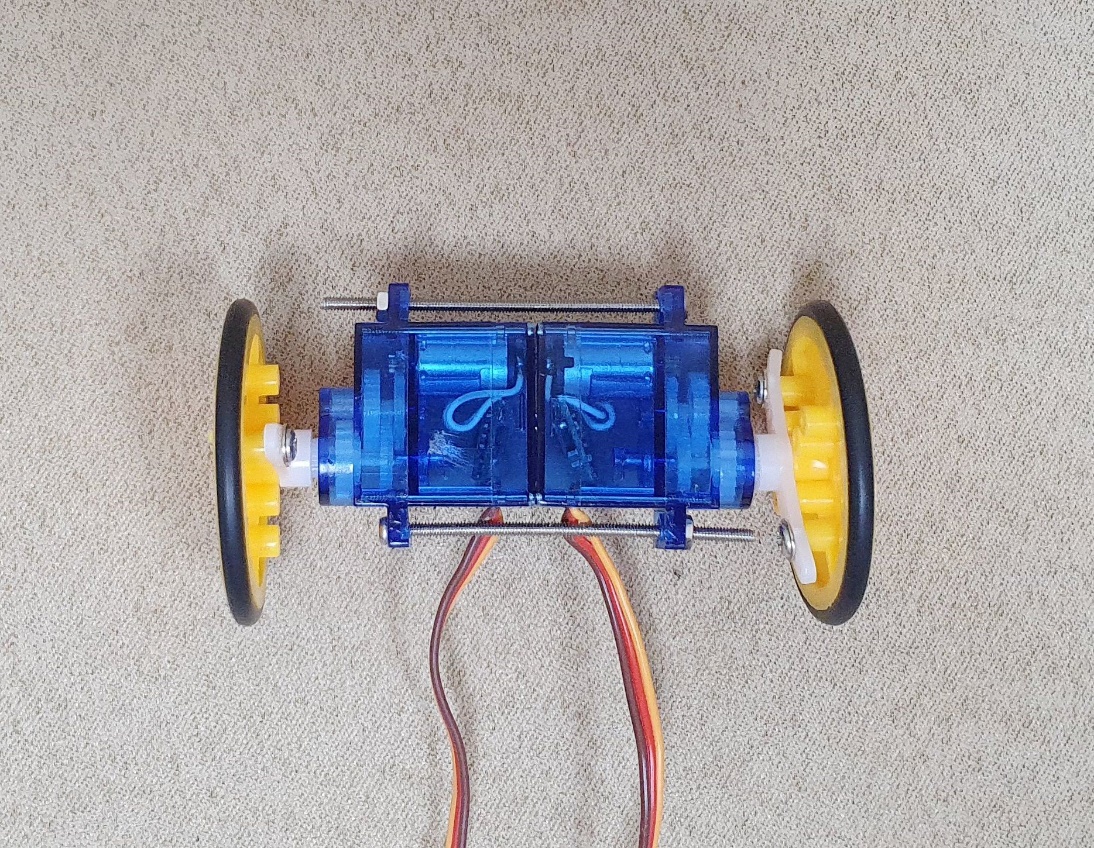
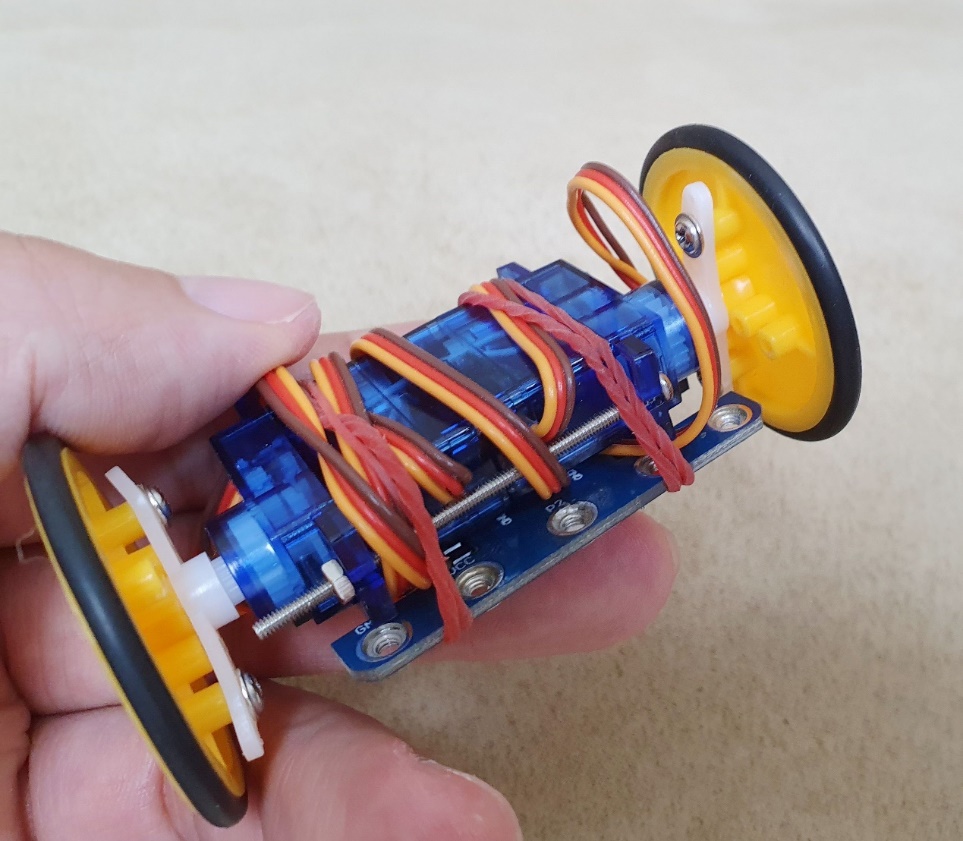
動力單元組合完整樣貌,如下圖所示:
因為線材太長,因此需將伺服馬達的連接線,纏繞在動力單元上,如下圖所示:
翻面繼續將線材纏繞在動力單元上:
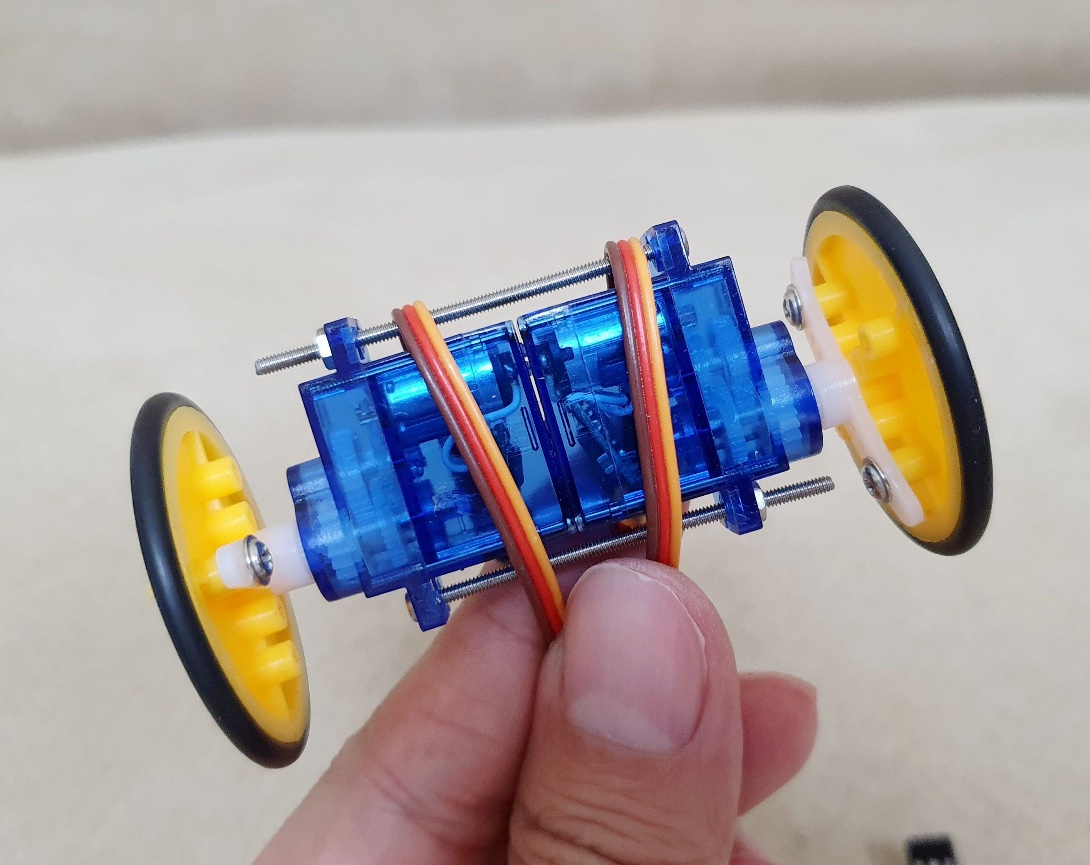
繼續纏繞直至線材纏繞完畢,如下圖所示:

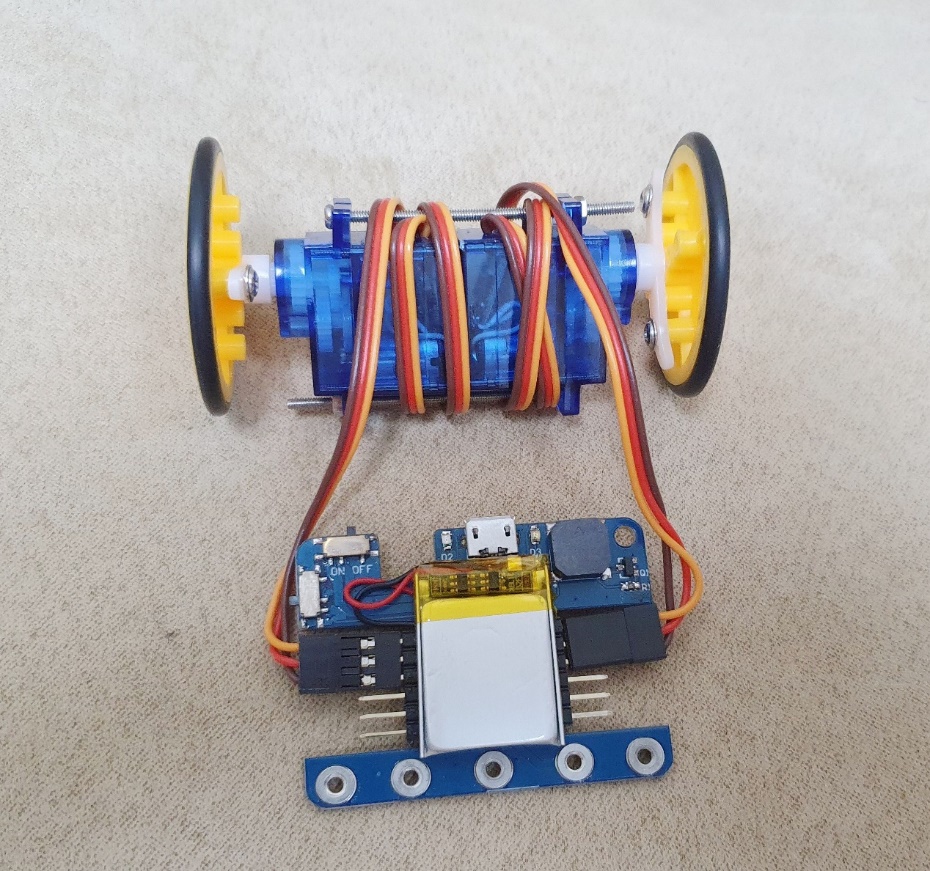
在纏繞完畢後,將驅動背板的充電口面向前,電池向上,右邊的伺服馬達線材接到右側前方(P1)接腳,請注意gnd線(棕色)朝後,如下圖所示:
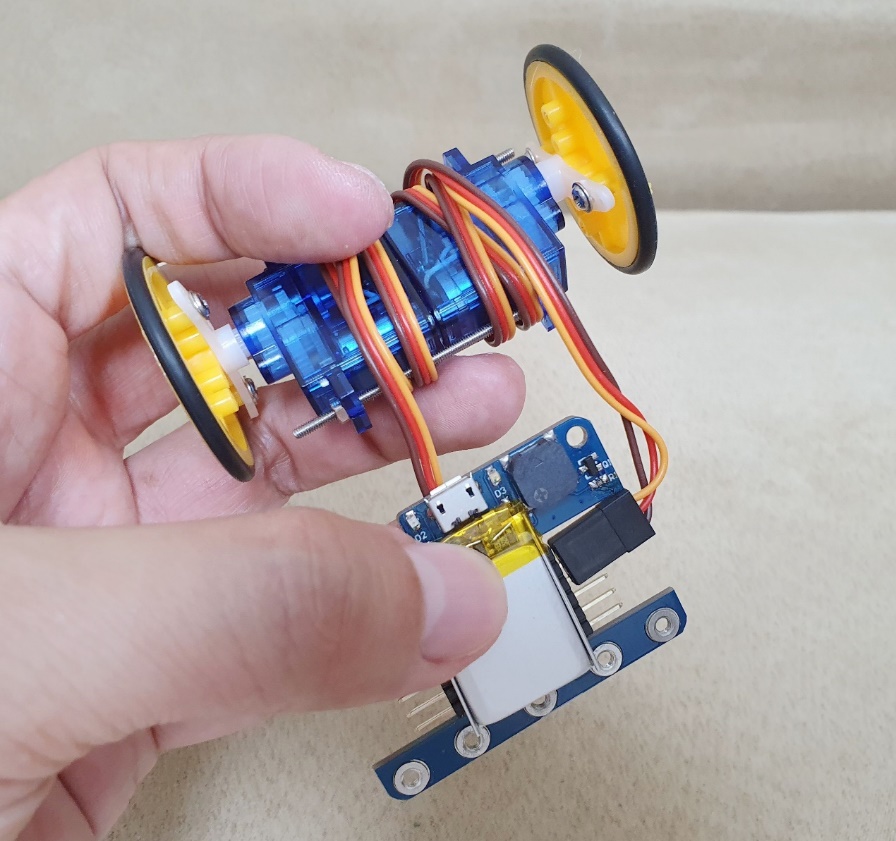
左側伺服馬達的線材請接在驅動背板的左側前方接腳(P2)、請注意gnd線(棕色)朝後,如下圖所示:
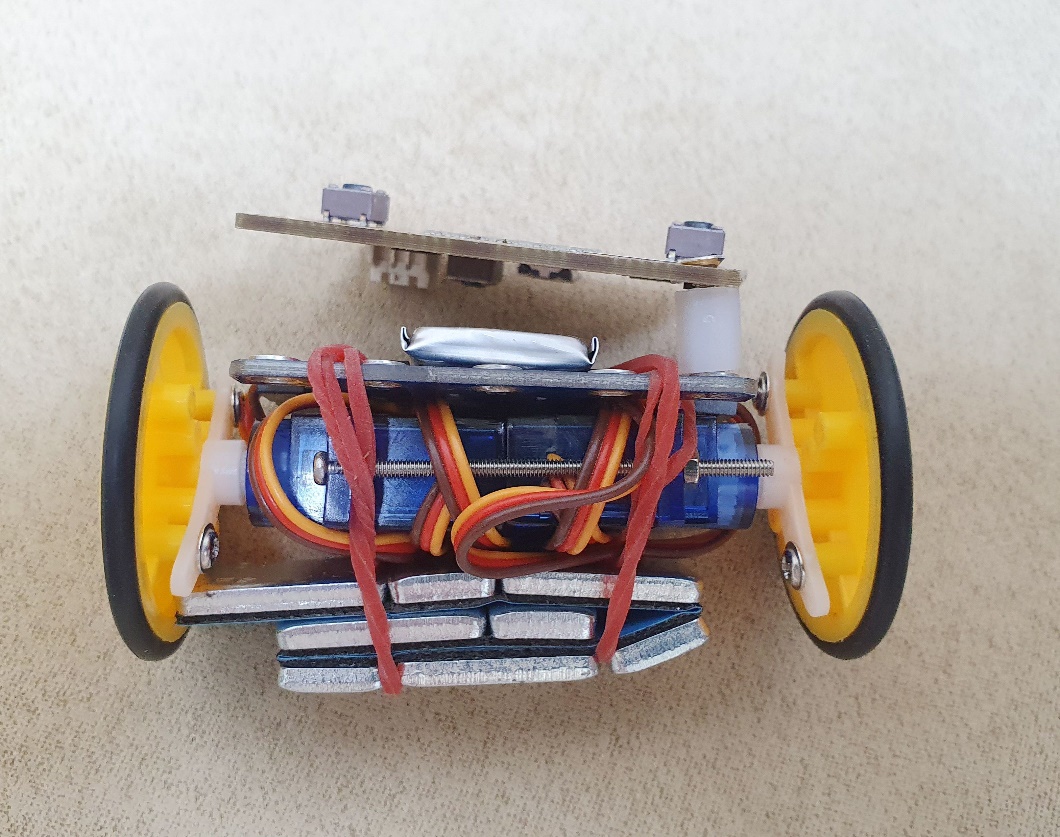
再將剩餘線材纏繞,直至驅動背板可以附在伺服馬達動力單元上,如下圖所示:
此時,便可取出橡皮筋,將動力元件與驅動背板固定在一起,如下圖所示:
值得注意的是在此圖中,右側線材沒有固定好,將在下一步改善。
當右邊有線材沒有捆紮固定,會影響輪子的轉動,因此需像下圖一樣,將兩側線材均以橡皮筋捆紮固定,以防勾到輪子,運作才會正常。

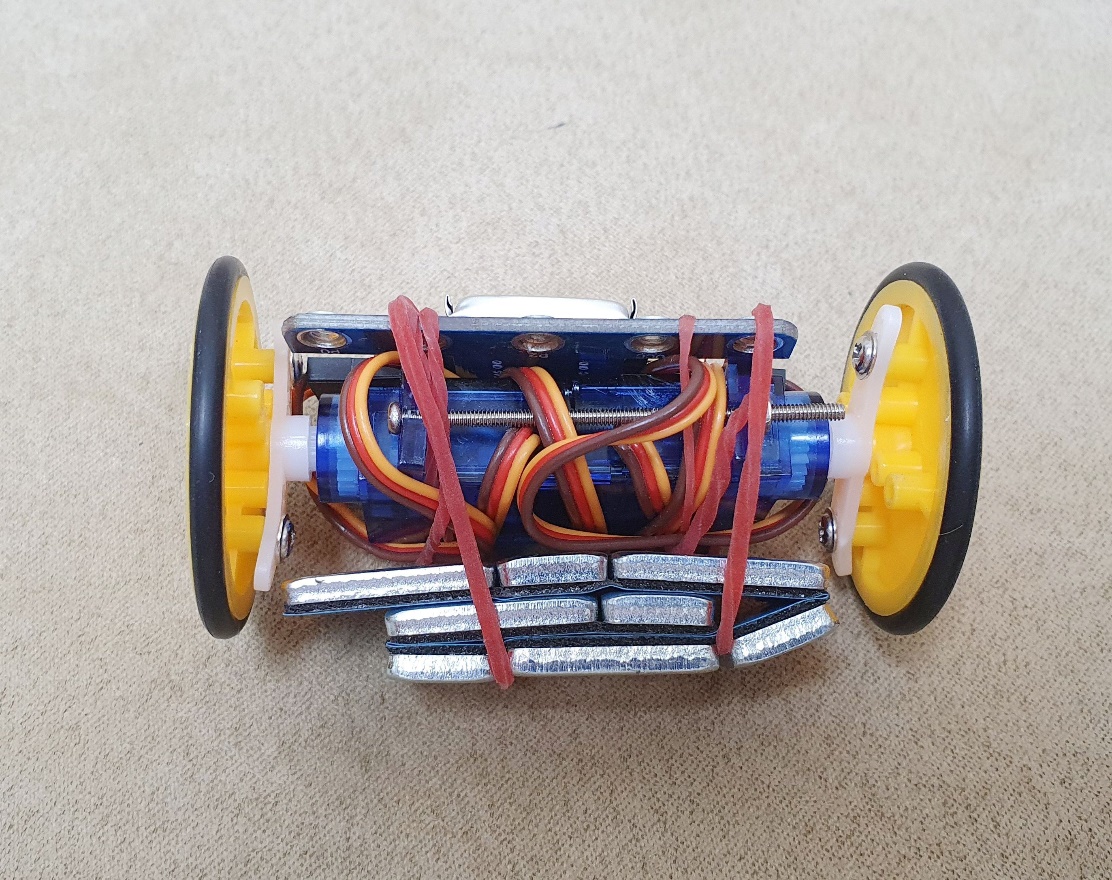
將配重塊折疊成以下形狀(不需從貼紙上拆開)

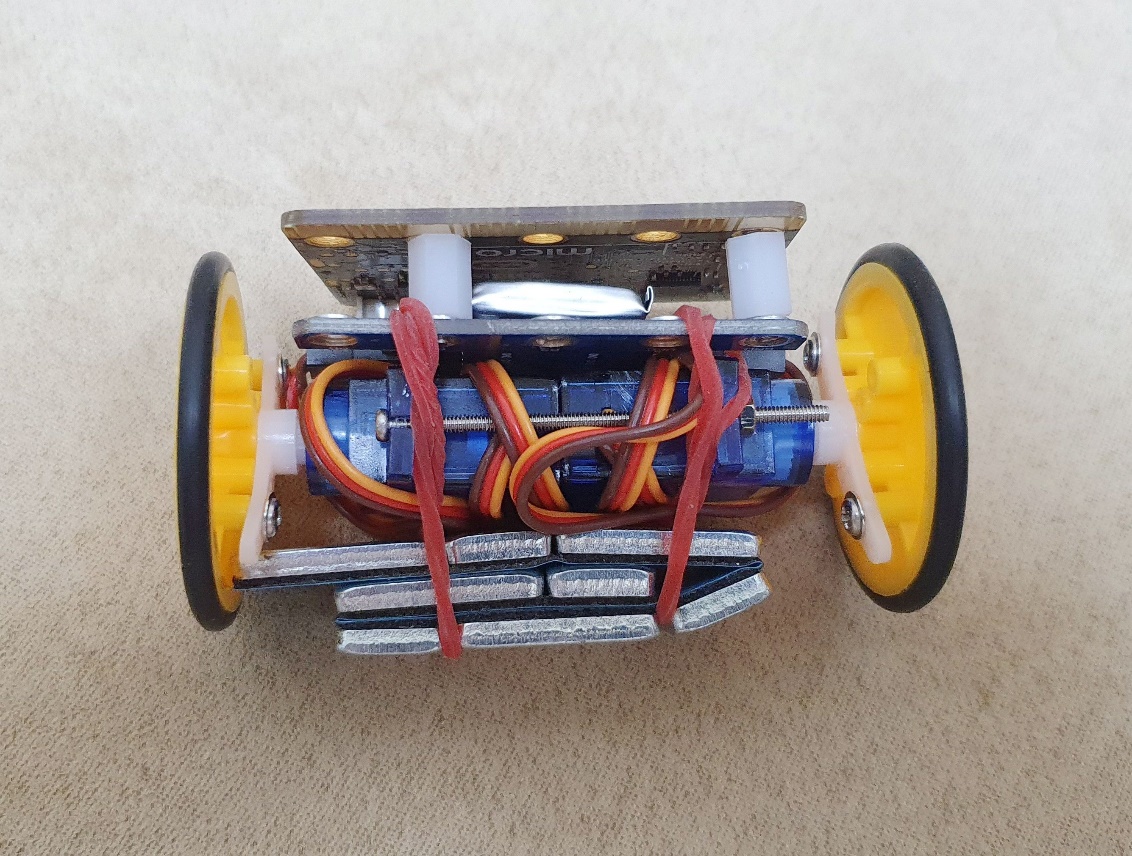
將配重塊以橡皮筋固定在動力單元底部,與驅動背板不同側,在固定時也請注意配重塊請不要干涉到輪子的運動,如下圖所示:
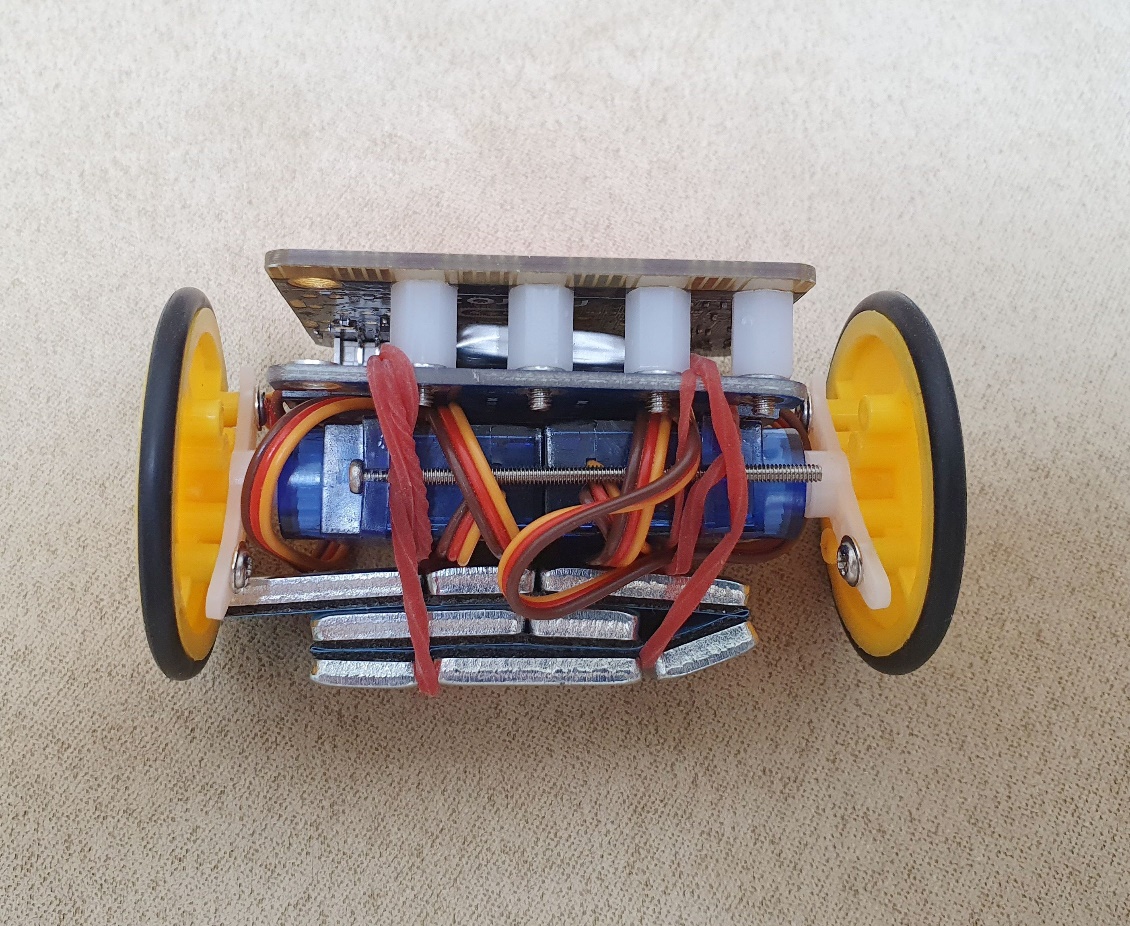
使用 使用 M3 * 8mm 尼龍柱和 M2.5 * 14mm 平頭螺絲,開始鎖上 micro:bit控制板,可以從最右邊的GND開始,插入螺絲釘,再套上尼龍柱,便可將micro:bit鎖上驅動背板,請注意一開始僅需鎖上即可,不用鎖緊(因為如果現在鎖緊,其他尼龍柱就難以放入,最後再鎖緊即可),如下圖所示:
接下來再依序鎖上P1、P2與3V,均有鎖到即可,不需要鎖緊,如下圖所示:
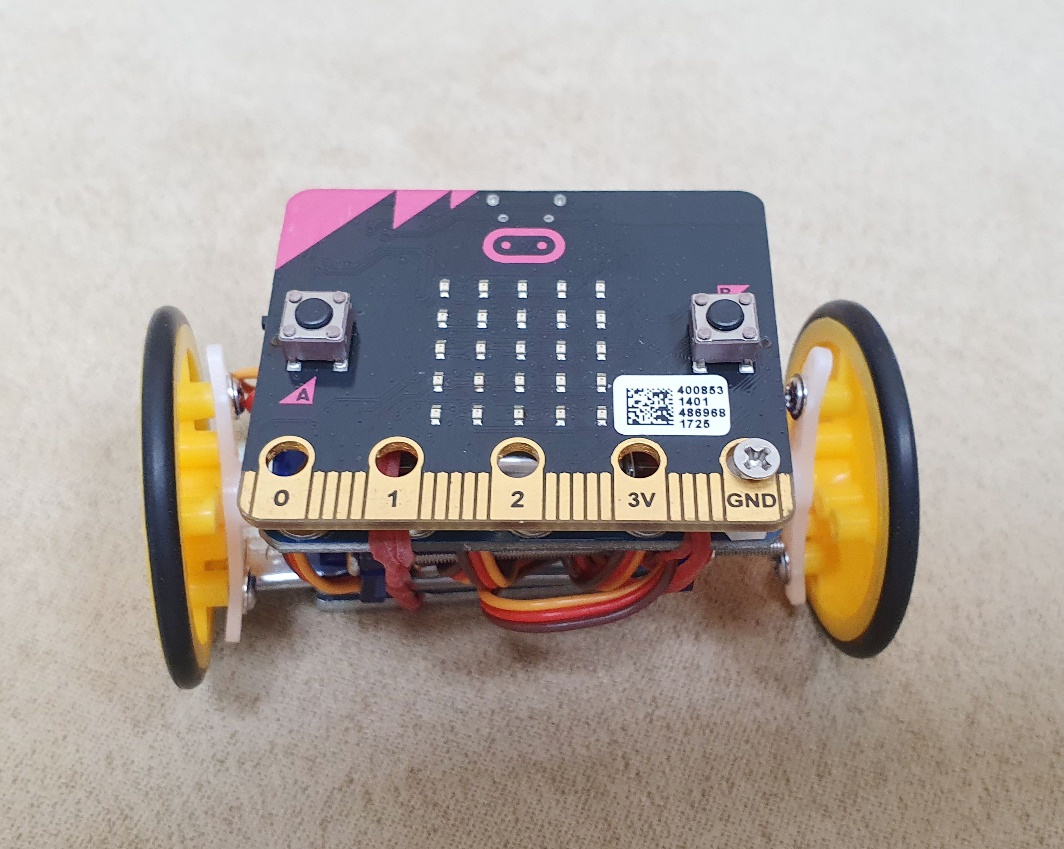
最終當P1、P2、3V與GND都鎖上後,此時即可將每一個螺絲均鎖緊,鎖緊才能使電源正常供應到馬達,如下圖所示:
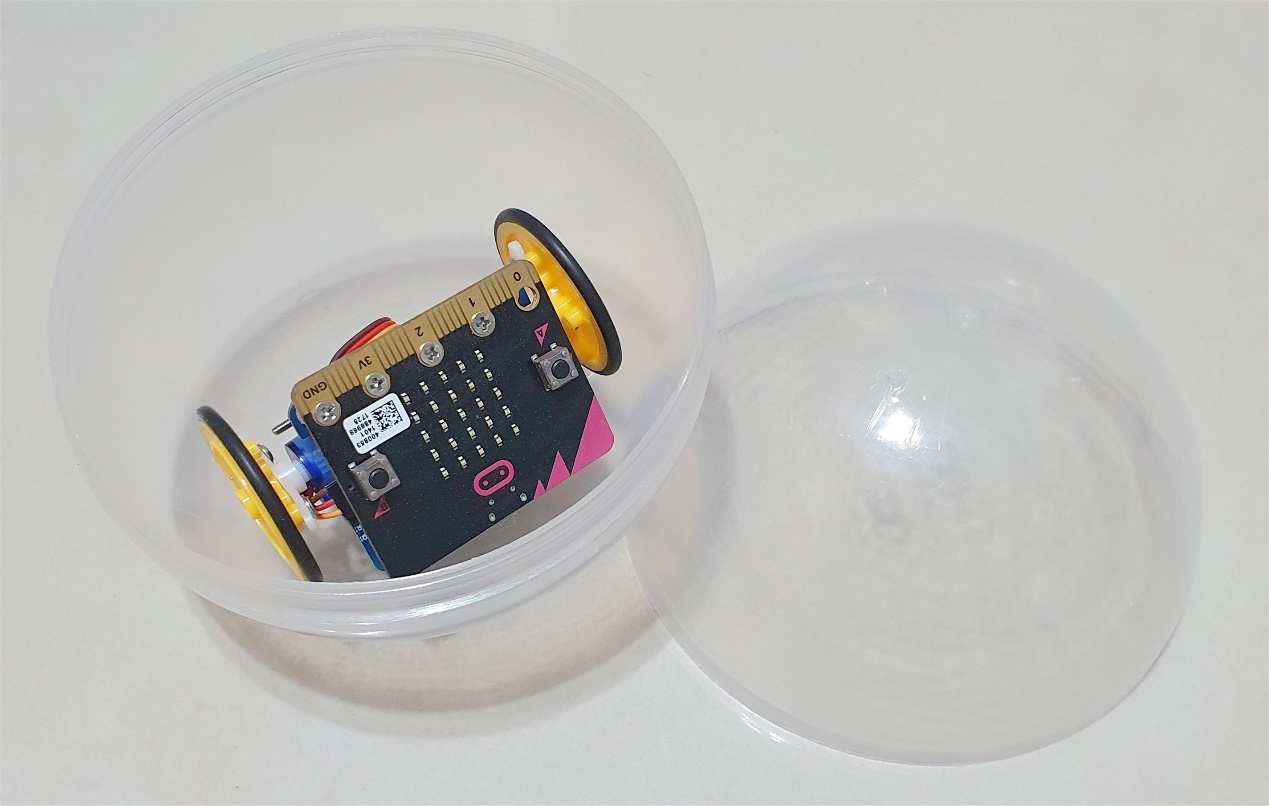
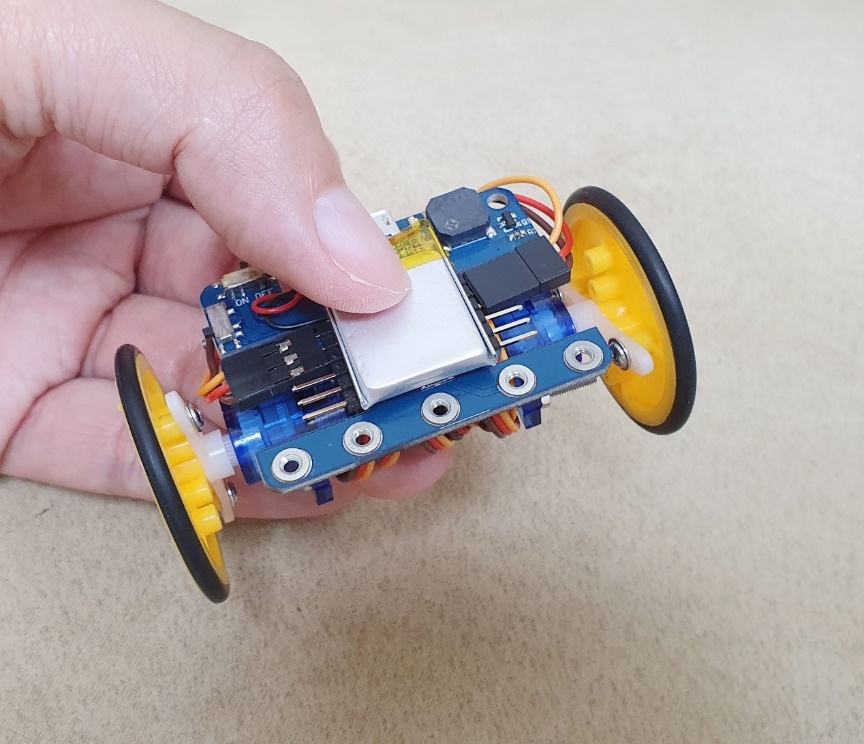
至此,硬體本身組裝便已完成,如下所示:
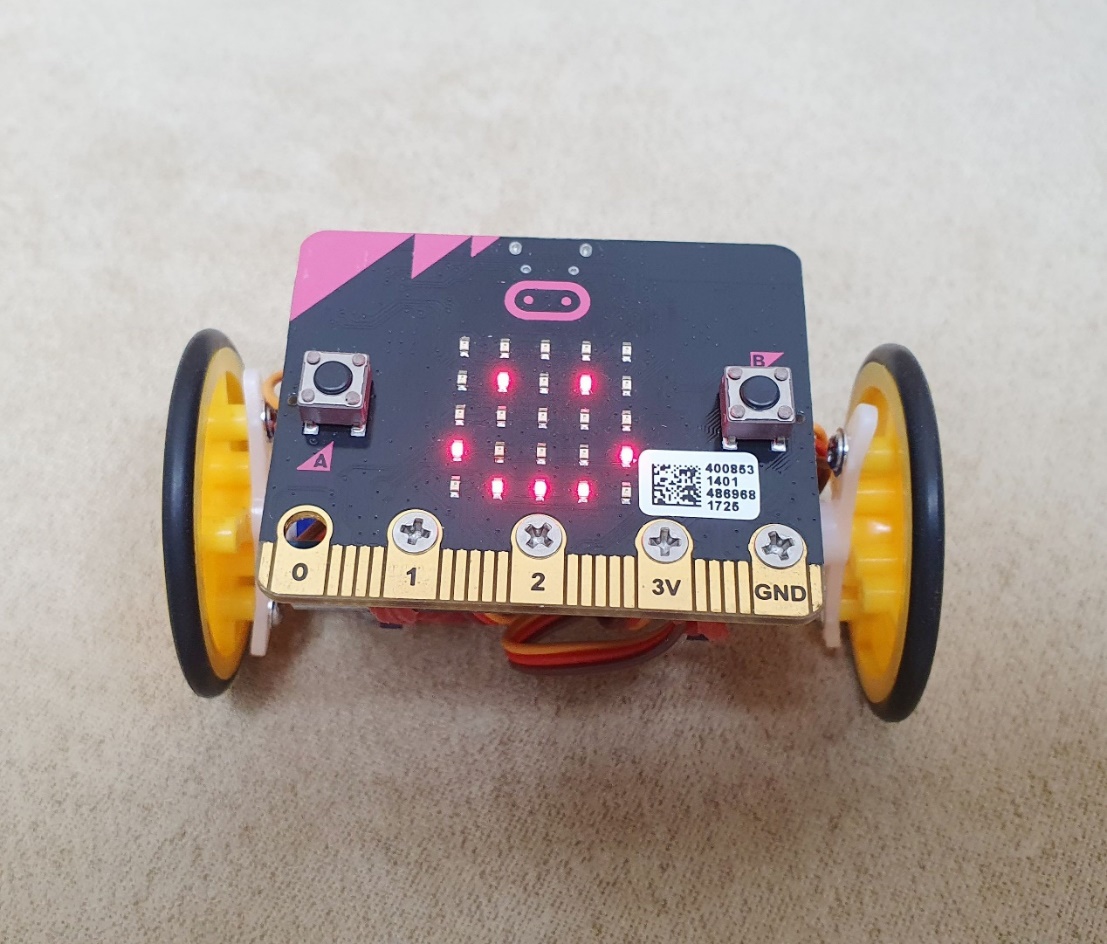
使用時,只需將開關打開供電(充電可用驅動背板上的micro USB接頭),並將機器人本體放入扭蛋殼中即可。

值得注意的是,若要在水面若沙地行走,請將扭蛋殼上的通氣孔,以膠帶內外封住即可。
提醒您:
以膠帶封住通氣孔,只能預防潑水,並不能完全防水,請勿將扭蛋直接壓入水中,倘若進水,將會造成電路板損壞。
3. 程式撰寫
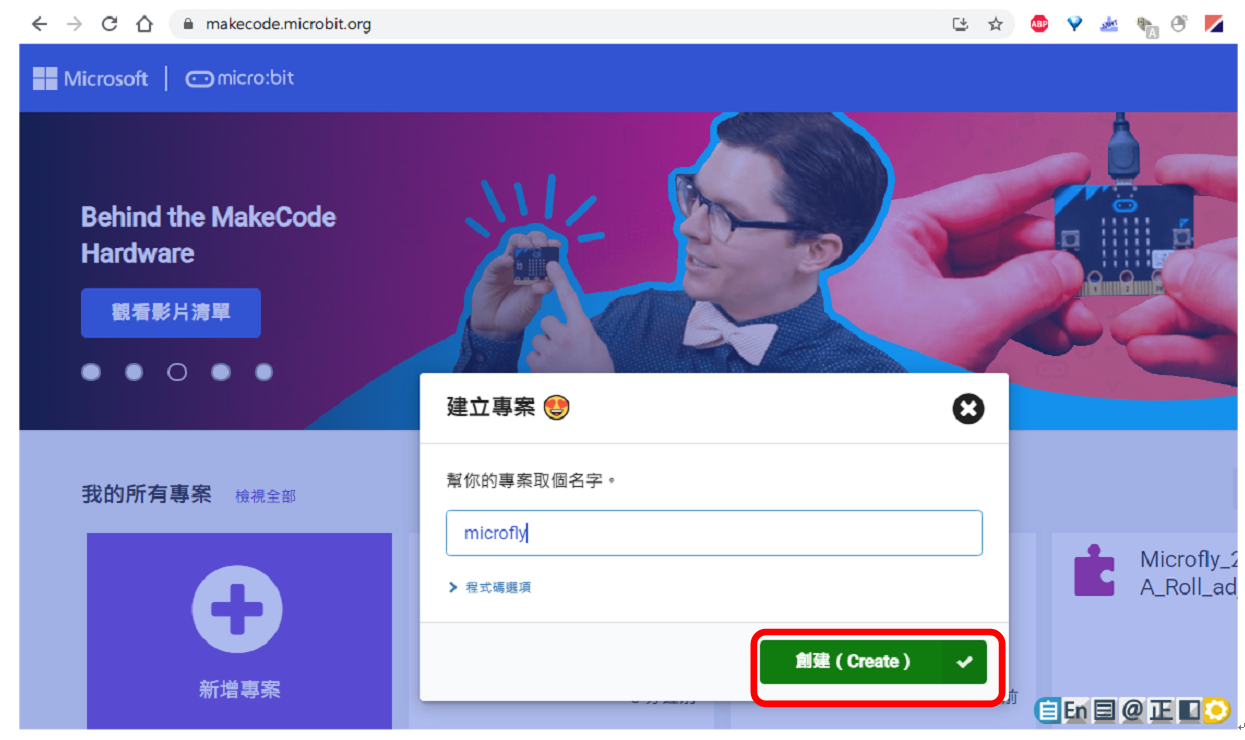
在一開始,請進入makecode網頁程式編輯器,其網址如下:https://makecode.microbit.org/。並新增一個專案(按下『新增專案』圖示),專案名稱可自行指定,指定完成後請按下『創建 (Create)』按鈕,如下圖所示。
在此專案中,我們將使用藍牙通訊與VC7RC遙控軟體,我們可透過『擴展』功能,大幅增加micro:bit的應用彈性。擴展按鈕在開發類別的中間。當按下『擴展』按鈕之後,可以看到有許多不同開發者所釋出的擴展套件,在這個視窗中,我們可以透過『搜尋』或『貼上網址』的方式來找到我們要使用的擴展功能。
因要使用藍牙通訊與VC7RC遙控軟體,我們將使用由劉正吉老師所開發的V7RC控制積木,請在『擴展』按鈕下運用『貼上網址』的方式,取得劉正吉老師所開發的V7RC控制積木,網址為:https://github.com/lioujj/pxt-V7RC
在上方搜尋欄位中貼上網址,並按下Enter開始搜尋後,便可找到V7RC積木,按下積木即可匯入,如下圖所示。

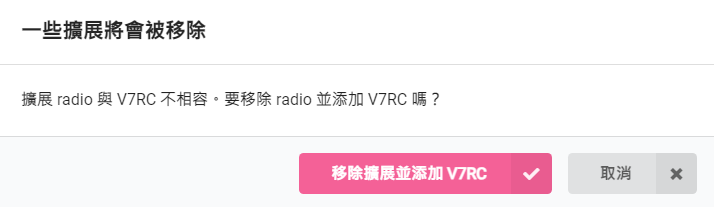
匯入V7RC積木後,系統會提示會移除原先的廣播功能,改以藍牙功能取代,請選擇『移除擴展並添加V7RC』即可。
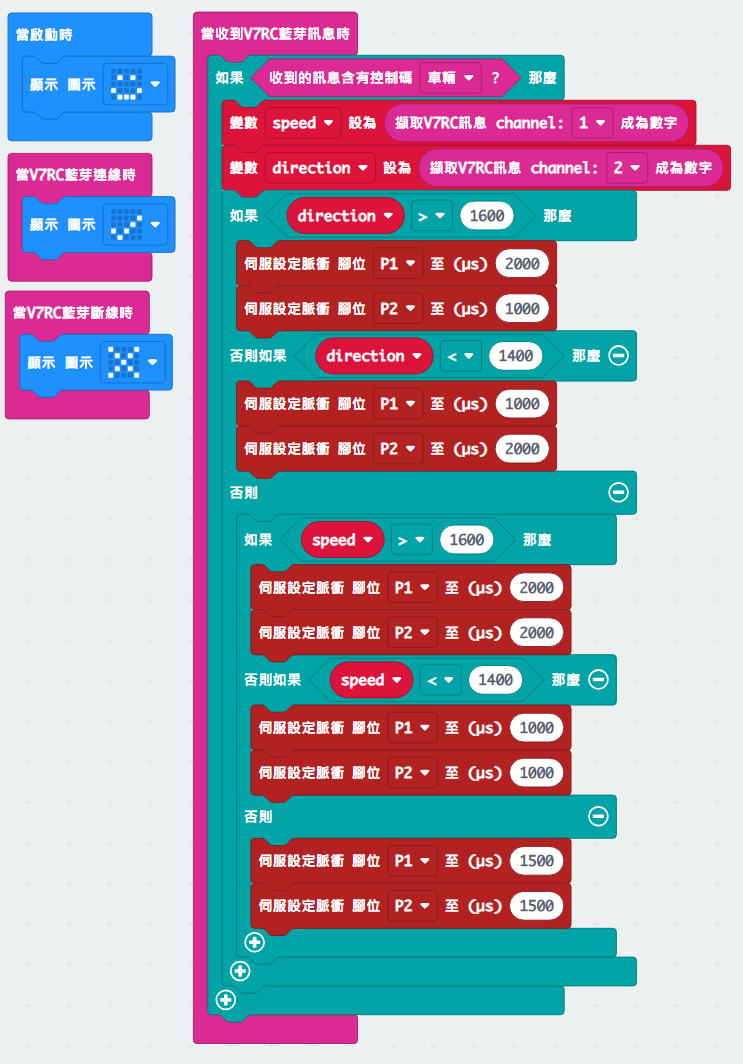
在完成這些設定後,我們便可以開始撰寫程式,完整程式如下所示,亦可至以下鍊結直接開啟已完成的程式專案:https://reurl.cc/8vNLzg
劉正吉老師的V7RC的積木說明,可參考以下網址:
4. V7RC手機遙控程式與連線
在本專案中,我們使用台灣嵐奕科技所開發的V7RC遙控軟體,請在Google Play或App Store上搜尋『V7RC』關鍵字,便可搜尋到應用程式並下載安裝,如下圖所示,提供Android與iOS兩個不同版本的QR code位址,可供直接掃描並安裝。

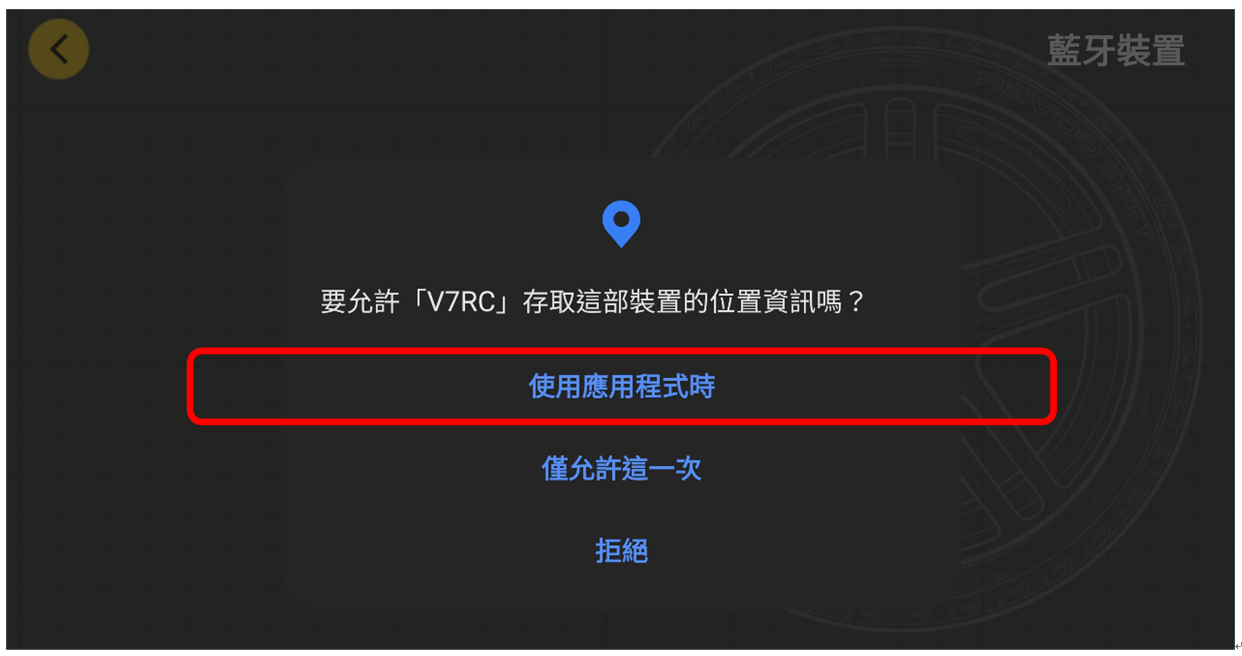
該應用程式(V7RC App)能夠與micro:bit透過藍牙通訊協定互相連接,因此請啟動行動裝置的藍牙通訊功能,若沒有啟動行動裝置的藍牙通訊功能,則行動裝置無法與micro:bit進行藍牙連線。因為V7RC會使用行動裝置上的藍牙連線,在V7RC App第一次連線時,系統會詢問是否允許存取位置資訊,請選擇『使用應用程式時』,賦予V7RC App藍牙的使用權限即可,這個畫面只會出現在初次連線,之後便不會再出現。
V7RC App成功啟動後,畫面如下,請點選最上方的『裝置:沒有裝置』字樣進入連線畫面:

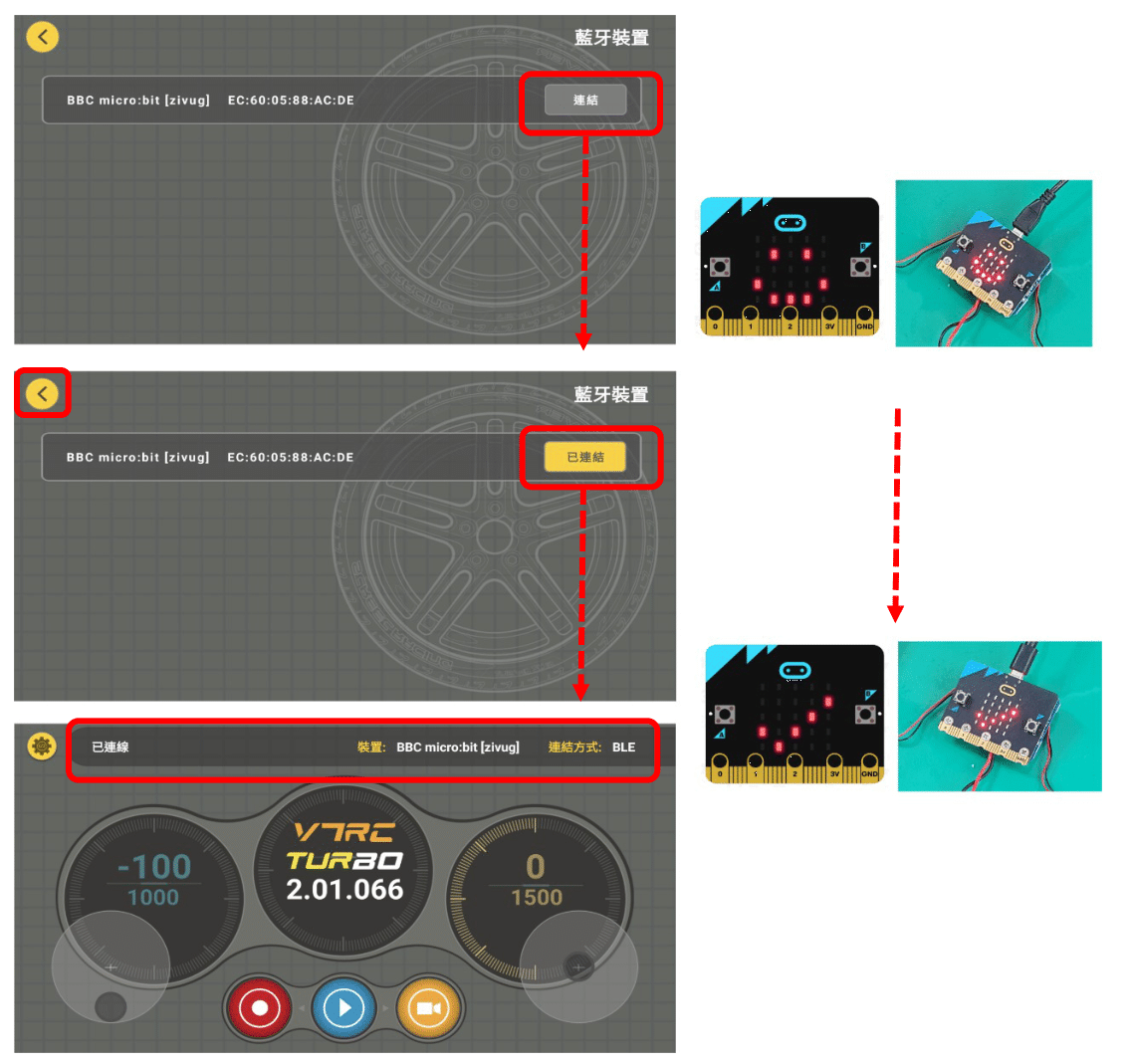
進入V7RC App連線步驟時,會顯示周邊可供連線的藍牙裝置,若是micro:bit裝置,則會顯示類似『BBC micro:bit[zivug] EC:60:05:88:AC:DE』這樣的可供連線的裝置字樣。其中[zivug]為這一塊micro:bit的序號,『EC:60:05:88:AC:DE』則是micro:bit的MAC網路位址。這兩個編碼,每一塊板子都不同,在多台MicroBall 球型機器人同時連線的時候,可以用來辨識哪一個MicroBall 球型機器人是要連線的目標。
在透過序號辨識,確認要連線的目標micro:bit後,便可按下後方的灰色『連結』按鈕進行連線。在連線前,micro:bit主板會顯示笑臉符號等待連結。在連線成功後,灰色『連結』按鈕會轉變為黃色的『已連結』按鈕。與此同時,micro:bit主板會顯示打勾符號,表示連結成功。此時請按下左上角箭頭返回,可以看到上方狀態列將顯示『已連線』,相關連接裝置訊息亦將顯示。
若micro:bit端程式撰寫正確,則成功連線後,micro:bit端的LED矩陣上,會顯示『打勾』圖示。且V7RC App上方裝置會顯示為已連線、BBC micro:bit等字樣。若經過這樣的測試成功的話,我們就可確定micro:bit與應用程式的連線沒有問題,可以繼續往下開發micro:bit端的程式。
但若無法成功連線,有以下幾個可能:
沒有正確燒錄程式至micro:bit
啟動V7RC App時,未允許存取位置資訊。
啟動V7RC App時,未啟用行動裝置之藍牙通訊功能。
完成連線後,即可透過V7RV App操作MicroBall 球型機器人,左手搖桿用於控制MicroBall 球型機器人的前進後退,右手搖桿用於控制MicroBall 球型機器人的左轉右轉,如下圖所示:

值得注意的是,如果左右手的搖桿與上圖操作不同,則可能是軸向設定錯誤,此時只需按下左側第二的黃色按鈕(CH)將軸向重設即可,如下圖所示:

按下軸向重設按鈕後,只需按下紅色『全部重置』按鈕,確定右手為頻道1,左手為頻道2即可,如下圖所示:

5. 使用KSB045搖桿連線與操作
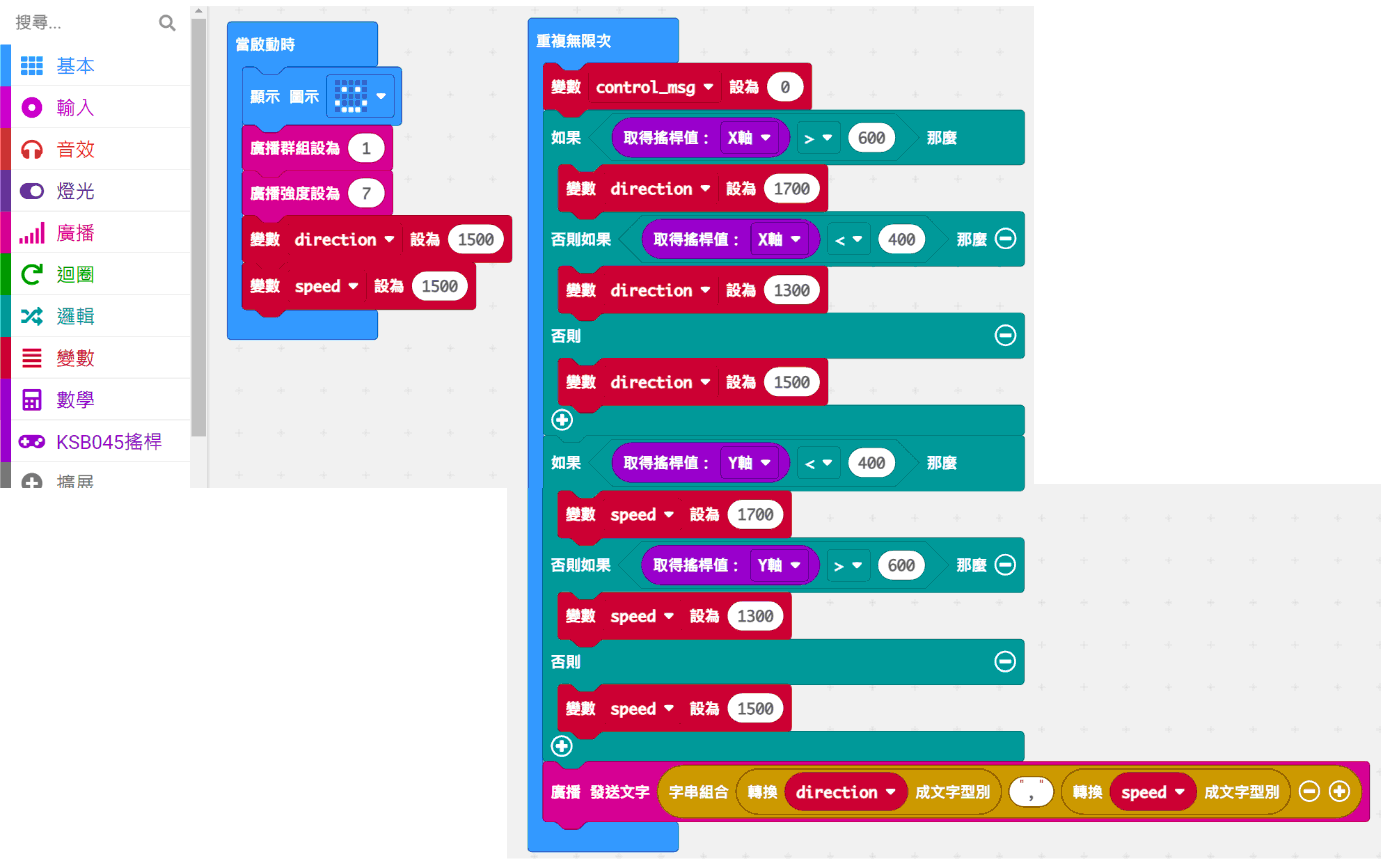
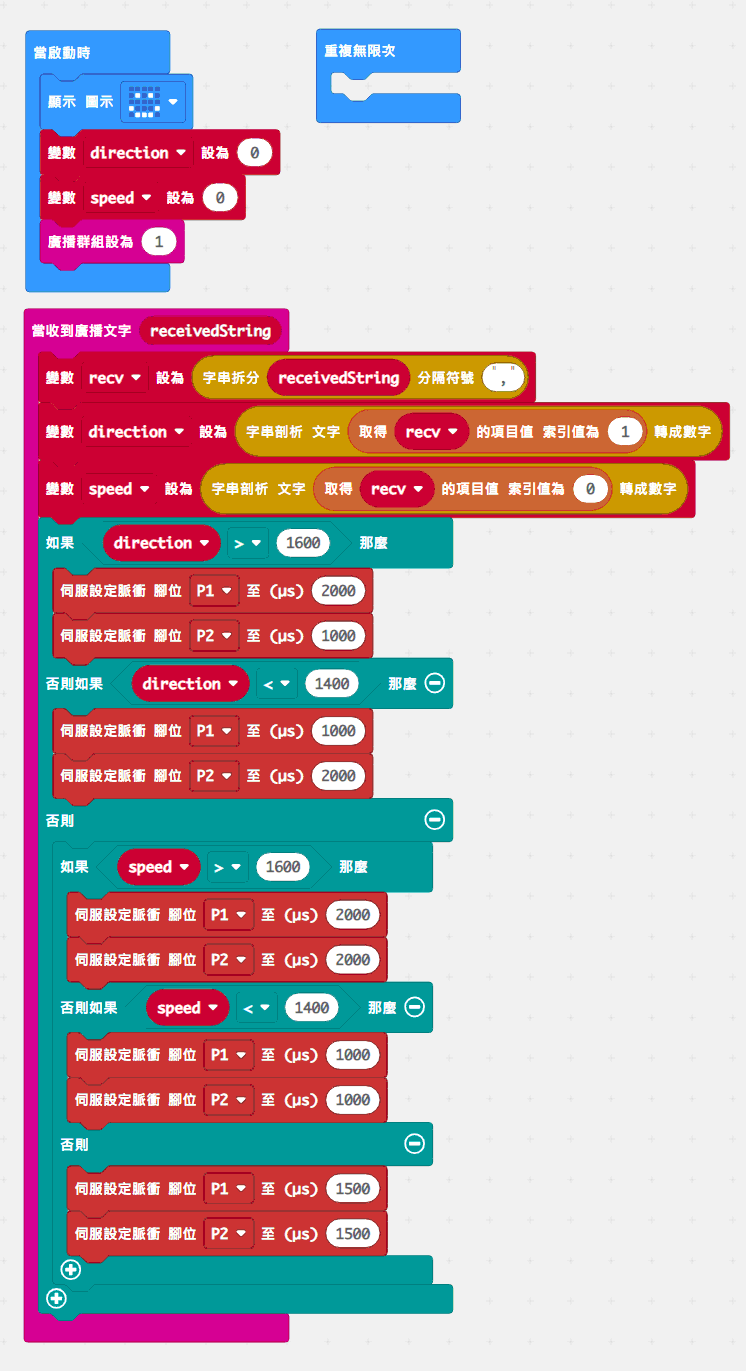
若使用者想要以KSB045搖桿操作MicroBall 球型機器人,也非常容易。首先必須改寫MicroBall 球型機器人內部程式,改以micro:bit內建的廣播功能,接收控制訊號,完整的MicroBall 球型機器人接收端程式如下:(可直接以此鍊結下載 https://reurl.cc/bY7n4E)。
同時,在KSB045搖桿上也需安裝一片用於發射控制訊號的 micro:bit,在撰寫搖桿端的控制程式時,建議以入劉正吉老師所設計的 KSB045專用積木,可大幅提昇程式撰寫速度,吉哥KSB045積木的說明網址如下:https://reurl.cc/93V5Nv,若要安裝此擴展,可以透過makecode中的『擴展』->『搜尋』功能,輸入該積木的網址: https://github.com/lioujj/pxt-KSB045,即可成功安裝。
完整搖桿端程式如下:https://reurl.cc/93V5Yv